임펠러 가공
적용 범위:
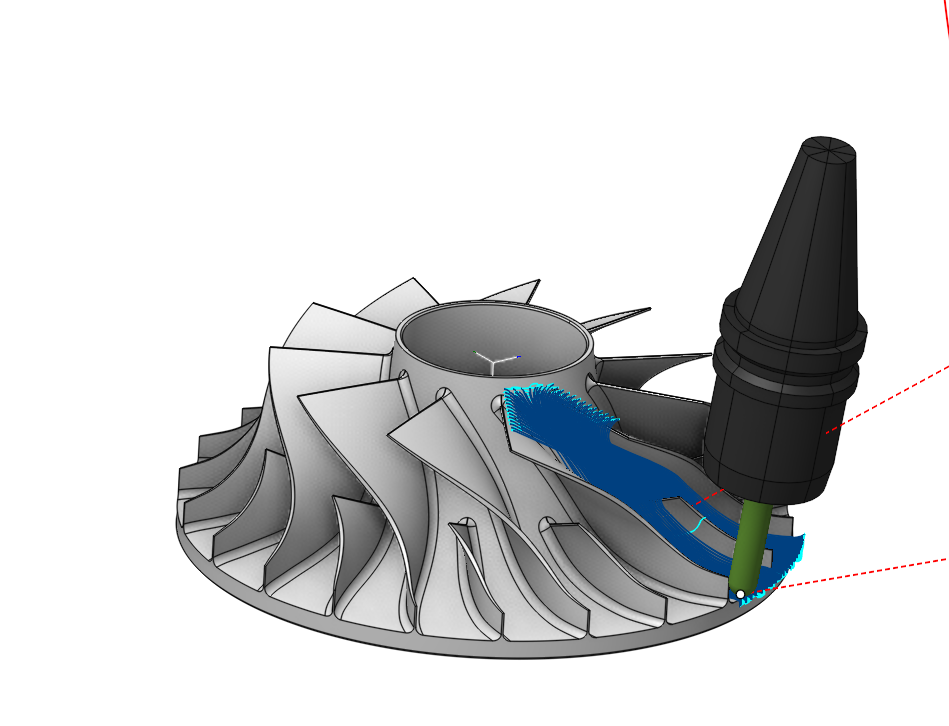
이 작업은 모노사이클 및 임펠러와 같은 파트의 5축 가공을 효율적으로 수행하며, 모노사이클의 황삭, 블레이드 및 허브의 정삭, 필릿 다듬질에 가장 적합한 공구경로를 생성하는 전략을 통합합니다. 또한 공구, 홀더 및 소재와의 충돌을 방지하는 추가 기능을 제공합니다.
작업 할당:
블레이드 곡면. 블레이드의 가공할 벽면을 정의합니다. 블레이드 지오메트리를 지정하지 않으면 시스템은 허브와 슈라우드 곡면 사이에 둘러싸인 가공 곡면에 대한 공구경로를 생성합니다. 황삭 가공의 경우 인접한 두 블레이드의 곡면을 선택합니다. 정삭 시 시스템은 선택된 블레이드 곡면을 가공합니다. 지오메트리 선택에는 블레이드의 작업 곡면, 상하부 곡면, 필릿이 포함되어야 합니다.
허브 곡면. 회전축을 식별하고 공구경로 형성을 위해 허브와 슈라우드 사이의 공간을 형성합니다. 허브는 회전 곡면이어야 합니다. 정삭 공정의 경우, 블레이드의 리딩 에지에서 트레일링 에지까지 걸쳐 있는 허브 곡면을 선택하면 됩니다.
슈라우드 곡면. 공구경로가 형성되는 허브와 슈라우드 사이의 공간을 형성하며, 특정 전략의 기준 곡선 역할을 합니다. 임펠러의 측면 윤곽을 제한하는 곡면을 선택해야 합니다.
속성. 요소의 속성을 표시합니다. 소재를 추가할 수 있습니다. 목록의 항목을 더블클릭하여 이 메뉴를 호출할 수도 있습니다.
삭제. 목록에서 항목을 제거합니다.
제한. 제한 영역. 가공하지 않아야 할 영역을 제한할 수 있습니다. 자세히 보기
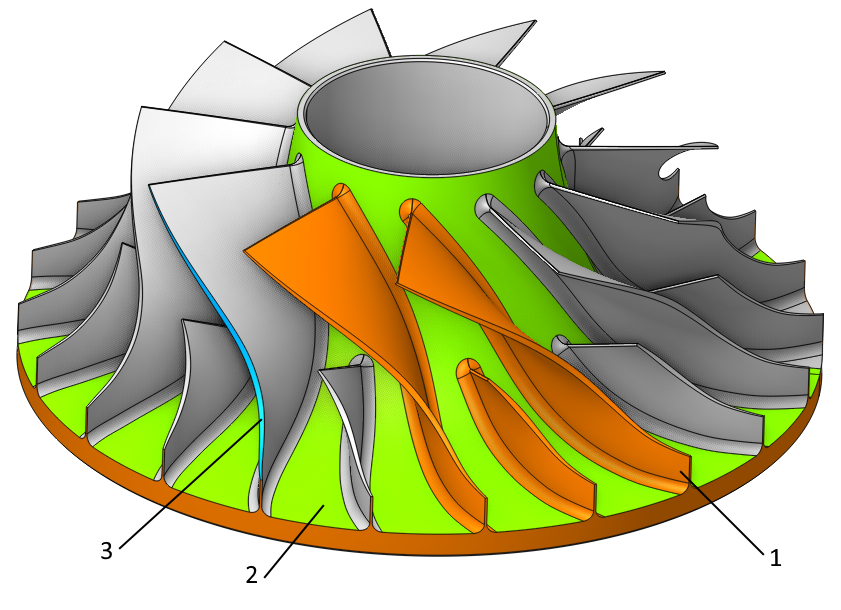
1-블레이드 곡면, 2-허브 곡면, 3-슈라우드 곡면.
전략:
가공:
가공 유형과 가공할 곡면을 지정합니다.
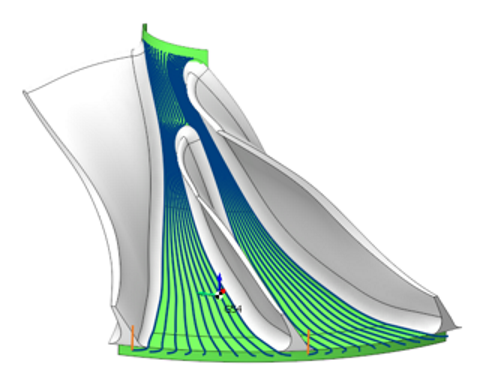
황삭. 허브 곡면, 슈라우드 곡면 및 인접한 두 블레이드 곡면으로 정의된 영역 내에서 임펠러 소재의 황삭 가공을 수행합니다. 허브 곡면, 슈라우드 곡면 및 인접한 두 블레이드 곡면으로 정의된 영역 내에서 임펠러 소재의 황삭 가공을 수행합니다. 블레이드 곡면.
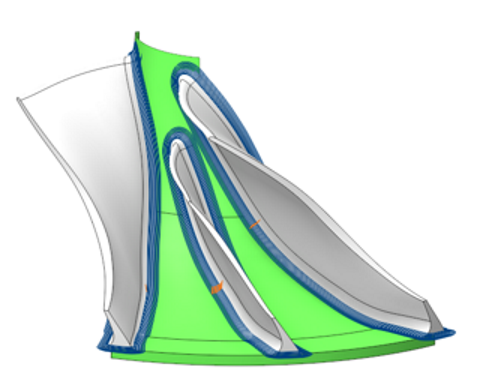
블레이드 정삭. 선택한 블레이드 곡면의 정삭 가공을 수행합니다. 먼저 허브 곡면과 슈라우드 곡면을 설정하십시오. 블레이드 곡면이 선택된 경우 해당 곡면만 가공합니다. 선택하지 않으면 임펠러의 모든 블레이드를 가공합니다.
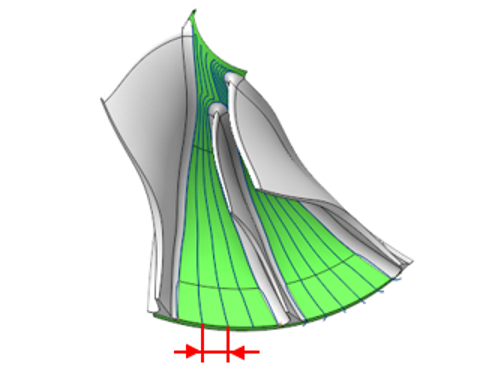
허브 정삭. 선택한 블레이드 곡면 사이 영역에서 선택한 허브 곡면의 정삭 가공을 수행합니다.
필릿 정삭. 블레이드와 허브 사이의 필릿 곡면을 정밀 가공합니다. 먼저 허브 곡면과 슈라우드 곡면을 설정하십시오. 블레이드 곡면이 선택된 경우 해당 영역만 가공합니다. 선택하지 않으면 임펠러의 모든 필릿 곡면을 가공합니다.
스텝. 허용되는 최대 절삭 폭입니다.
깊이 스텝. 황삭 패스 간의 거리입니다.
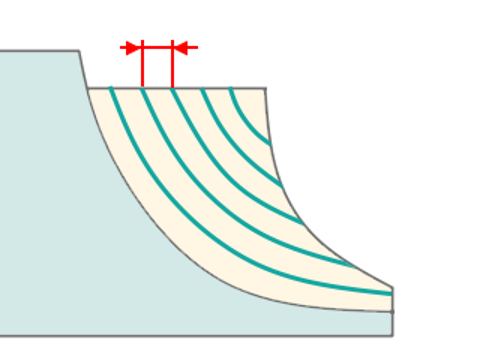
횟수. 필릿 정삭 전략이 활성화된 경우 필릿 곡면의 패스 횟수입니다. 이 패스 수는 필릿 중심에서 양쪽으로 확장됩니다.
전략:
이 파라미터를 통해 원하는 공구경로를 설정할 수 있습니다:
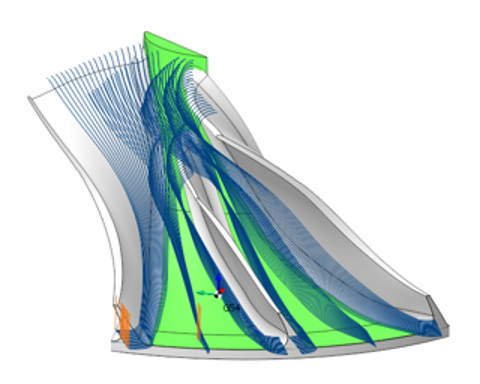
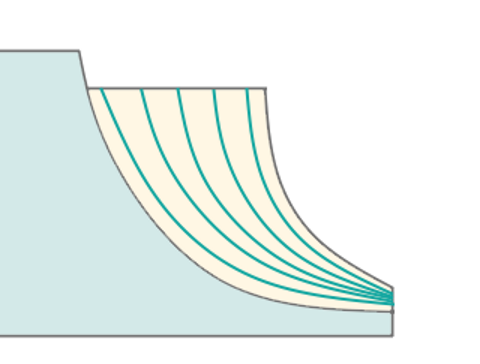
슈라우드와 허브 사이 모프. 공구 경로는 슈라우드의 생성선에서 허브의 생성선으로 부드럽게 전환되는 선으로 구성됩니다. 정삭의 경우 지정된 스텝, 황삭의 경우 황삭 스텝 간격으로 패스합니다. 공구 경로는 슈라우드의 생성선에서 허브의 생성선으로 부드럽게 전환되는 선으로 구성됩니다. 정삭의 경우 지정된 스텝, 황삭의 경우 황삭 스텝 간격으로 패스합니다.
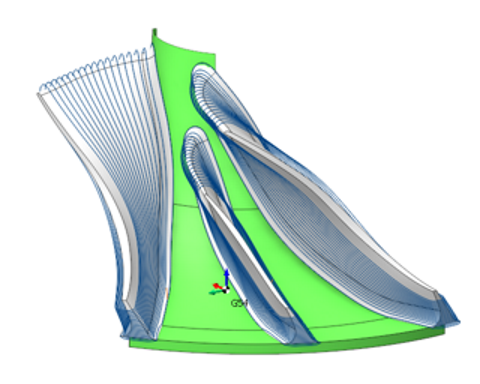
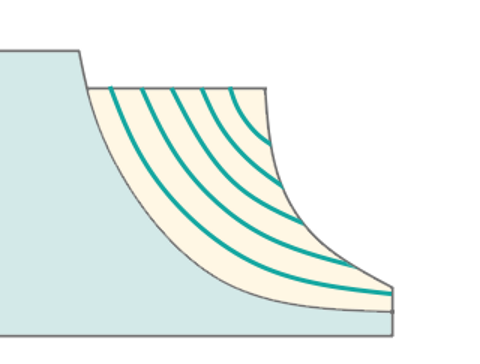
허브 오프셋. 시스템은 정삭의 경우 지정된 스텝, 황삭의 경우 황삭 스텝만큼 허브 곡면을 오프셋한 곡면 위에 공구경로를 생성합니다.
공구 방향:
공구 축 방향을 제어합니다.
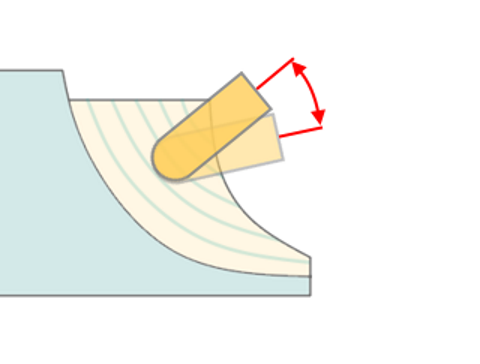
리드 각도. 이는 이동 방향 평면 내에서의 추가 공구 틸트 각도입니다.
충돌 방지:
홀더 검사 기능과 함께, 공구 홀더가 파트와 충돌하는 공구경로 구간을 감지하고 지정된 전략에 따라 해당 구간을 수정합니다.홀더 검사자세히 보기.
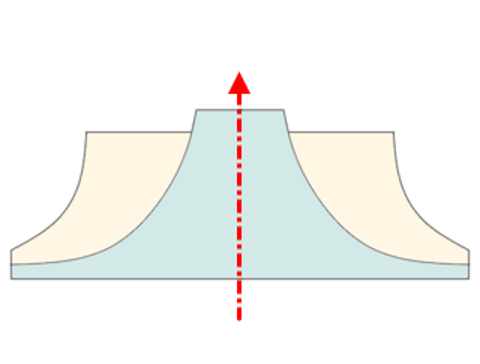
회전축:
이 기능을 사용하면 임펠러의 축을 수동으로 지정할 수 있습니다. 이 기능을 사용하면 임펠러의 축을 수동으로 지정할 수 있습니다. 임펠러의 기하학적 축이 통과해야 할 공작물 좌표계 또는 글로벌 좌표계 축 중 하나를 선택합니다.
정렬:
곡면 가공 중 공구경로 패스의 순서를 제어합니다. 곡면 가공 중 공구경로 패스의 순서를 제어합니다.
트림 롤.
커터가 모델의 날카로운 외부 모서리 주위를 '롤링'합니다. 공구 경로는 부드럽지만 항상 최적은 아닙니다. 이 파라미터는 워터라인 황삭 작업과 유사하게 동작합니다.워터라인 황삭 작업. 자세히 보기
링크/리드:
링크/리드 탭에서는 급속 이동에 대한 파라미터를 정의합니다. 이러한 이동에는 공구 교환 위치에서의 접근, 작업 행정 시작으로의 진입, 최종 절삭 동작 후의 퇴피, 작업 패스 간의 전환, 공구 교환 지점으로의 복귀가 포함됩니다. 좌표를 따른 이동 순서, 이동 궤적 및 변위량을 설정할 수 있습니다.
이송 속도/회전 속도:
이 대화상자에서 스핀들 회전 속도, 급속 이송 값 및 공구경로의 각 영역별 이송 값을 정의할 수 있습니다. 스핀들 회전 속도는 분당 회전수 또는 절삭 속도로 정의할 수 있습니다. 정의된 값에 밑줄이 표시됩니다. 다른 값은 공구 직경을 고려하여 정의된 값을 기준으로 재계산됩니다. 자세히 보기
변환:
작업 내에서 계산된 공구 궤적의 좌표 변환을 수행할 수 있는 작업 파라미터 세트입니다. 자세히 보기
파트:
파트는 가우지 검사를 위한 공간을 정의하는 지오메트리 요소의 그룹입니다. 자세히 보기
공작물:
작업의 공작물 모델은 가공할 재료를 정의합니다. 자세히 보기
고정구:
고정구로는 척, 그립, 클램프 등의 고정 보조 장치 및 기타 성격의 제한 영역이 지정됩니다. 자세히 보기