5축 공작 기계의 축 맵
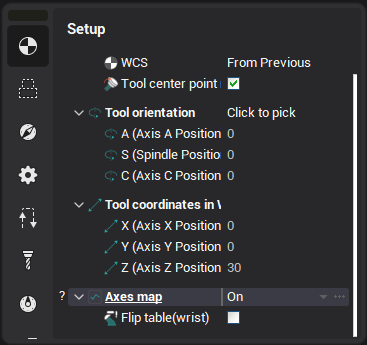
축 맵 피처는 로봇 추가 축 최적화와 유사하게 5축 공작 기계의 작업 궤적을 최적화하는 데 사용할 수 있습니다. 이 피처는 기본적으로 비활성화되어 있으며, 활성화하려면 <설정> 인스펙터 탭의 "그래프 생성" 콤보박스를 사용하십시오. 공구경로 최적화를 위한 전용 창을 열려면 콤보박스 오른쪽에 있는 줄임표 버튼을 사용하십시오. 현재 5축 가공에 사용할 수 있는 축 맵 유형은 C축 맵과 리드/린 각도 맵 두 가지입니다.로봇 추가 축 최적화그래프 생성설정
"C축" 맵
공구의 Z축을 중심으로 회전을 담당하는 공작 기계의 회전축은 흔히 "C"로 명명됩니다(보완 축은 A 또는 B축). 5축 궤적은 공구경로를 따라 공구 방향을 정의하며, 기본적으로 각 공구경로 점에서 지정된 공구 방향을 달성하기 위해 공작 기계 회전축의 최적값이 선택됩니다. 그러나 경우에 따라 장애물 충돌이나 특이점으로 인한 회전축 운동의 제어 불가능한 급격한 스파이크가 발생하는 바람직하지 않은 궤적이 생성될 수 있습니다. 이 피처를 사용하면 축 맵 스플라인을 통해 공구경로를 따라 회전축 중 하나의 값을 직접 지정할 수 있습니다. 보조 축의 값은 사용자가 정의한 공구 법선으로부터의 편차를 최소화하도록 자동으로 선택됩니다. 공통 사용자 인터페이스 부분은 로봇 축 맵 문서 페이지에 설명되어 있으며, 아래에는 C축 편집 피처에 대한 정보가 있습니다.CAB 충돌특이점축 맵 스플라인로봇 축 맵
편차 맵
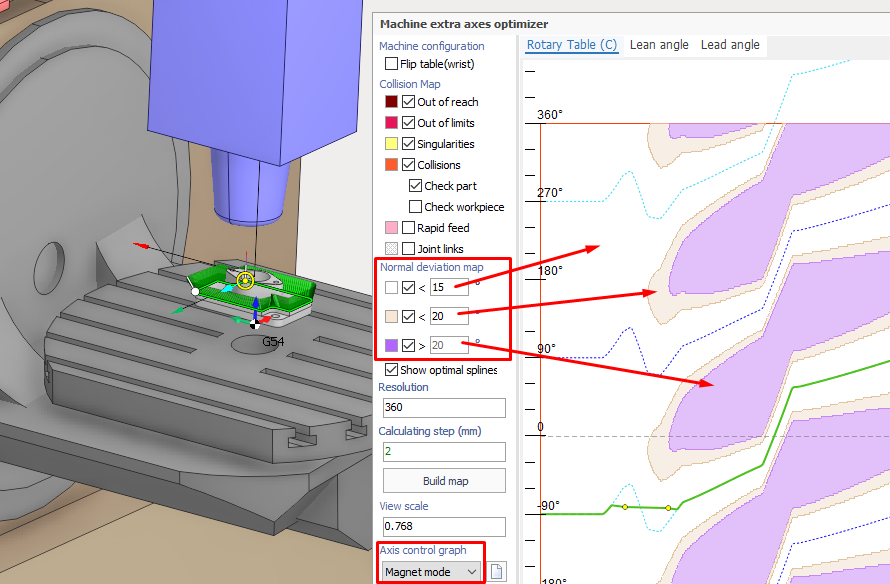
C축 맵 탭을 선택하면 창의 주요 부분에 2D 컬러 맵이 표시됩니다. 이 맵은 각 가능한 C축 값(수직축)과 각 공구경로 점(수평축)에 대해 최적값(작업 지정에서 지정된)으로부터의 공구 법선 최소 가능 편차를 보여줍니다. 동일한 색상의 영역은 동일한 지정 범위 내에서 최소 편차를 가집니다. 범위는 왼쪽의 "정규 편차 맵" 패널에서 사용자 정의할 수 있습니다. 맵에는 장애물 충돌 영역도 포함될 수 있습니다.정규 편차 맵
최적 스플라인
이 맵의 점선 스플라인(편집 불가)은 각 공구경로 점에서 C축 값이 최적인 경우에 해당합니다. 이러한 최적값은 고유하지 않으며, 360도 이동만큼 차이가 나거나 "테이블 플립" 파라미터의 다른 고정값에 해당합니다. 최적 스플라인의 표시/숨김은 "법선 map deviation" 패널 아래의 체크박스로 전환할 수 있습니다. 테이블 플립
스플라인 편집 모드
C축 스플라인 편집에는 세 가지 모드가 있습니다. 처음 두 모드는 로봇 축 맵과 동일합니다. 각 모드에서 궤적은 사용자 정의 제어점으로 정의됩니다. 더블 클릭으로 새 제어점을 생성하고 드래그하여 위치를 조정합니다.
스플라인 모드 - 축 궤적은 지정된 경유점을 통과하는 스무딩 곡선으로 정의됩니다.
폴리라인 모드 - 이전과 동일하지만, 제어점이 직선 세그먼트로 연결됩니다.
자석 모드 마그넷 모드 - 축 궤적도 제어점으로 정의되지만, 제어점 사이는 특수 알고리즘으로 생성됩니다. 목표는 최적 스플라인과 가장 차이가 적은 궤적을 달성하는 것입니다. 연속된 두 점의 경우를 살펴보겠습니다.
두 점이 어떤 최적 스플라인보다 서로 더 가까운 경우 직선 세그먼트로 연결됩니다.
두 점이 동일한 최적 스플라인 근처에 있는 경우, 먼저 해당 스플라인에 스무딩하게 연결되고 그 연결점 사이에서 궤적이 최적 궤적과 일치합니다. 어떤 점이 최적 스플라인에 매우 가까운 경우, 스플라인에 연결되지 않고 해당 점 근처에서 사용할 최적 스플라인을 "정의"합니다.
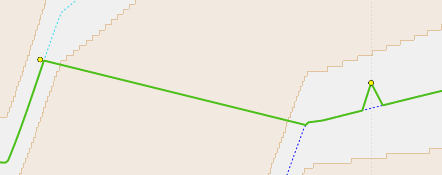
두 점이 서로 다른 최적 스플라인에 가까운 경우, 알고리즘은 두 스플라인 사이의 최근접점을 검색하여 직선으로 연결합니다. 그런 다음 첫 번째 점은 왼쪽 최근접점에, 두 번째 점은 오른쪽 최근접점에 연결됩니다(동일한 최적 스플라인에 해당하므로). 아래는 세 번째 설명 사례에 대한 축 궤적 예시입니다.
리드/린 각도 맵
리드/린 각도는 5축 가공에서 공구경로를 따른 공구의 기울기와 공구경로의 수직 평면에서의 측면 기울기를 각각 정의하는 중요한 파라미터입니다. 작업 공구경로를 따라 이러한 파라미터 값을 제어하려면 리드 또는 린 각도 탭으로 전환하십시오. 사용자 인터페이스는 로봇 추가 축 최적화와 동일합니다.로봇 추가 축 최적화
참고: