홀더 검사 (충돌 방지)

적용 범위:
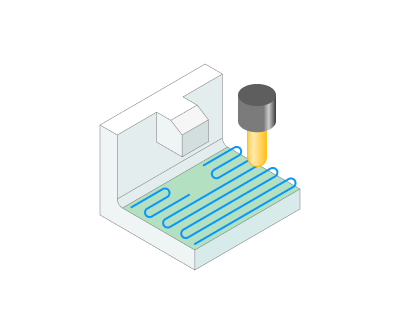
홀더 검사 기능은 공구경로에서 공구 홀더가 파트와 충돌하는 구간을 감지하고, 지정된 전략에 따라 해당 구간을 수정합니다.
충돌 방지 방법:
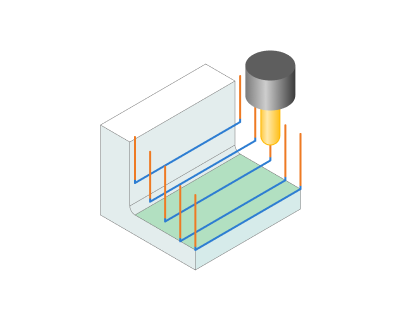
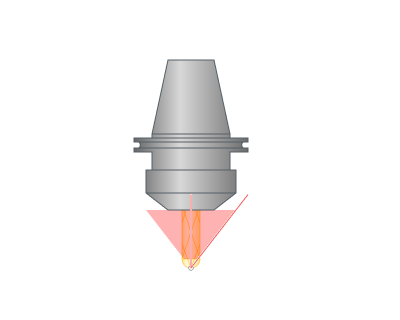
트림 툴패스.공구경로 트림. 충돌 구간(빨간색)이 공구경로에서 제외됩니다.
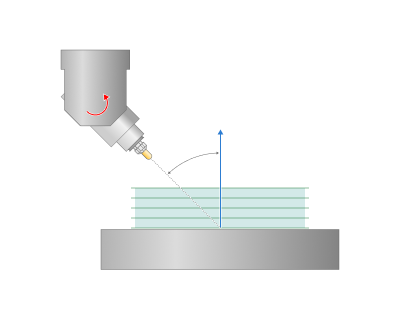
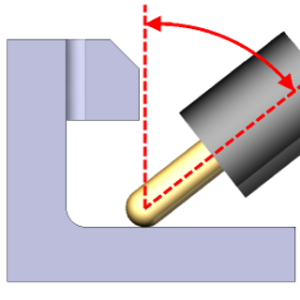
전면 틸트.공구가 전면 평면(공구 패스 평면)에서 충돌 반대 방향으로 기울어집니다.
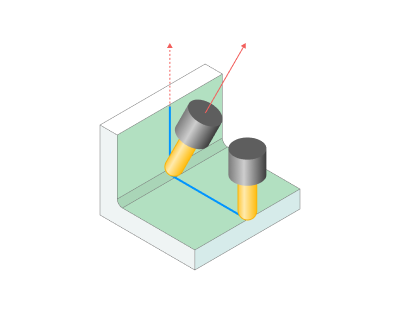
측면 틸트.공구가 측면(공구경로에 수직인 평면)에서 충돌 반대 방향으로 기울어집니다.
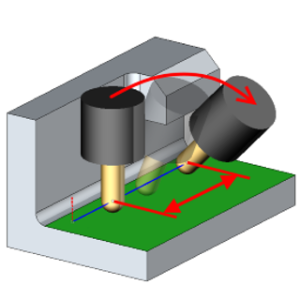
회전축 방향 틸트.공구가 회전축과 공구 접촉점으로 형성된 평면에서 지정된 틸트 각도만큼 초기 방향에서 벗어납니다. 회전축 주위에 회전축이 있는 5축 공작 기계에서만 작동합니다. 예를 들어, 테이블의 C 회전축이 이에 해당합니다.
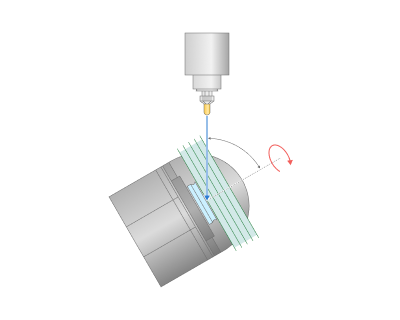
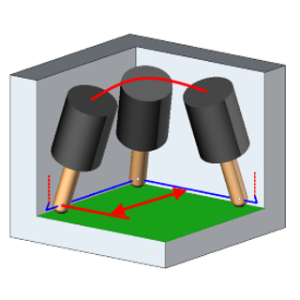
회전축 주위 틸트. 공구가 회전축에 수직인 평면에서 지정된 틸트 각도만큼 초기 방향에서 벗어납니다. 회전축 주위에 회전축이 없는 공작 기계에서만 작동합니다.
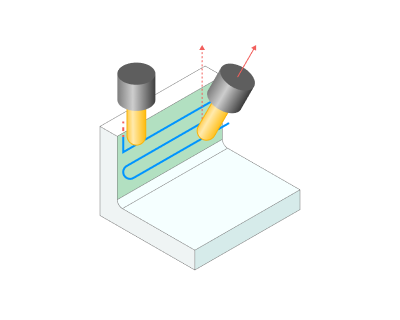
공구 축 방향 오프셋. 공구경로가 지정된 거리 내에서 공구 축 방향으로 이동하여 공구 홀더와 공작물의 충돌을 방지합니다. 이 경우 공구경로는 연속성을 유지합니다.
충돌 방지 파라미터.
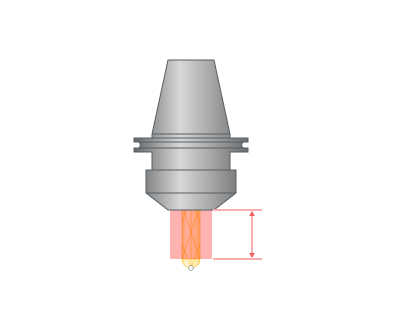
공구 작업 길이. 공구 축 방향의 공구 절삭 길이 값을 지정합니다(사용 가능 길이 LU, ISO 13399 기준).
공구 반경 방향 여유. 공구 축에 수직인 방향에서 공구의 비절삭 부분과 공작물 사이의 최소 안전 거리를 지정합니다.
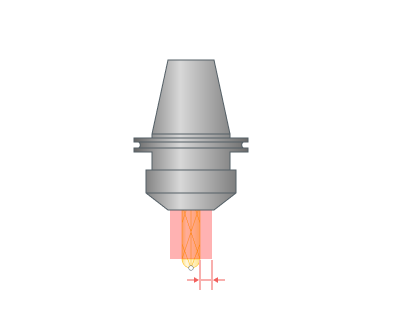
공구 각도 여유. 공구의 비절삭 부분 주위의 안전 영역은 절두 원뿔 형태로, 꼭짓점의 반경은 공구 반경에 공구 반경 방향 여유를 더한 값이며, 각도는 공구 각도 여유와 같습니다.
홀더 반경 방향 여유. 공구 축에 수직인 방향에서 홀더와 공작물 사이의 최소 안전 거리를 지정합니다.
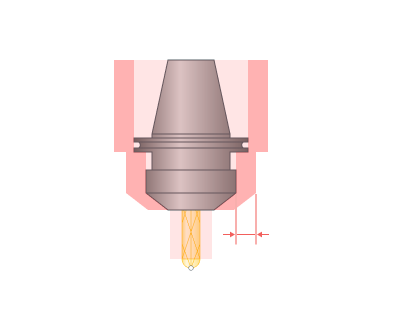
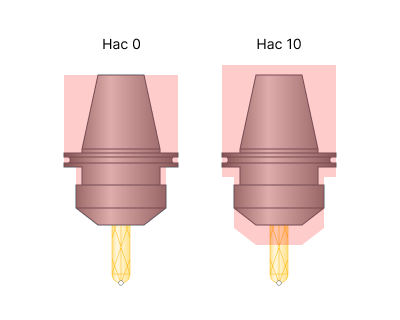
홀더 축 방향 여유. 공구 축 방향에서 홀더와 공작물 사이의 최소 안전 거리를 지정합니다. Hac - 홀더 축 방향 여유.
고정 리드 방향. 장애물에 접근할 때 선택한 글로벌 좌표계를 기준으로 지정된 각도(홀더 검사에서 지정한 갭을 고려)로 공구의 이동 방향을 고정합니다.


추가 틸트 각도. 충돌 방지 틸팅 전략에서 안전한 무충돌 공구경로를 보장하기 위한 추가 여유 각도입니다.
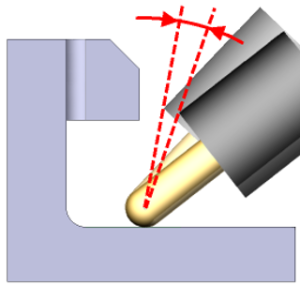
최대 틸트 각도.허용되는 최대 기울기 각도입니다.
관성. 값이 클수록 공구 축 기울기가 더 부드러워집니다. 0은 스무딩 없음을 의미합니다.
법선 블렌드 거리. 현재 공구 기울기 방향을 계산하는 데 사용되는 공구경로 상의 두 점 사이의 거리입니다. 불규칙한 형상을 가공할 때 불필요한 공구 축 진동을 제거하려면 더 큰 값을 사용하십시오. 내부 코너를 가공할 때는 홀더 반경보다 큰 값을 사용하십시오.
추가 거리. 공구 홀더와 공작물 간의 충돌을 방지하기 위해 공구 축 방향으로 공구경로를 이동시키는 거리입니다.
최대 거리. 허용되는 최대 추가 거리입니다.
스핀들 검사. 공작물과 공작 기계 스핀들 유닛 간의 충돌 방지를 제어하는 파라미터입니다.
자동. 이 모드는 공작 기계 구성의 3D 모델을 사용하여 충돌 계산을 수행합니다.
수동. 이 모드에서는 절두 원뿔과 원기둥으로 구성된 안전 영역과 공작물 간의 충돌을 시스템이 모니터링합니다. 상부 반경, 각도 및 최대 반경이 원뿔을 정의합니다. 최대 반경이 원기둥을 정의합니다.
스핀들 반경 방향 여유. 공구 축에 수직인 방향에서 스핀들 노드와 공작물 사이의 최소 안전 거리를 지정합니다.
스핀들 축 방향 여유. 공구 축 방향에서 스핀들 노드와 공작물 사이의 최소 안전 거리를 지정합니다.
최대 반경. 자동 모드에서는 가공 중 공작물과 충돌할 수 있는 스핀들 인접 부품(스핀들 헤드 등)을 포함하는 원기둥의 반경입니다. 수동 모드에서는 안전 영역의 최대 반경입니다.
반경. 스핀들 노드의 외접 반경입니다.
각도. 스핀들 노드 주위의 안전 영역은 절두 원뿔 형태로, 꼭짓점의 반경은 반경에 스핀들 반경 방향 여유를 더한 값이며, 각도는 해당 각도와 같습니다.