셋업 패널
적용 범위:
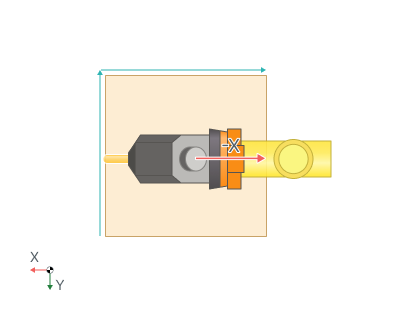
셋업 탭은 프로젝트의 기본 파라미터를 설정하는 데 사용됩니다. 여기에는 장비 위의 파트 위치 지정, 파트의 좌표계 설정 등이 포함됩니다.
셋업 및 공구 장착.
시뮬레이션 방법.
모델링 방법을 변경합니다. 각 모드에는 고유한 장단점이 있습니다. '복셀 5D'가 기본 모드입니다. 빠른 모델링이 가능하며, '솔리드' 모델링은 시간이 더 걸리지만 더 높은 정밀도를 제공합니다. 예를 들어, 큰 파트에서 작은 구멍을 가공할 때는 '솔리드' 모델링을 선택해야 합니다.
작업 좌표계 내 공구 좌표
이 탭은 기하학적 좌표계를 표시합니다. 괄호 안에는 특정 축을 따른 이동에 해당하는 물리적 축의 이름이 표시됩니다.
선형 물리적 축
해당 축의 물리적 원점(해당 축의 끝단 센서)에 대한 공작 기계 선형 축의 좌표값입니다. 여기에는 작업 좌표계 내 공구 좌표에 포함되지 않는 모든 주요 물리적 축 좌표가 표시됩니다.
기타 축
이 그룹은 척 조의 이동과 관련된 축 등 보조 축을 지정합니다.
축 맵
축 맵을 사용하면 로봇의 과잉 자유도(6번째 축, 레일 축, 회전 테이블 축)에 대한 수동 제어 법칙을 정의하고 자동 제어 법칙을 미세 조정할 수 있습니다. 이 기능은 축 맵 파라미터 옆의 말줄임표 버튼을 눌러 사용할 수 있습니다. 가공을 최적화하기 위해 장비의 사용 가능한 축 간에 전환할 수 있습니다.축 맵
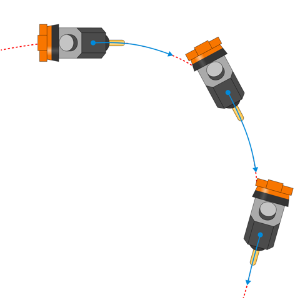
6번째 축 제어
축 방향 공구(밀링, 빔, 제트)를 위치시키려면 5개의 자유도가 필요합니다. 표준 산업용 로봇은 6개의 축을 가지고 있습니다. 공구가 로봇 최종 관절의 회전축과 정렬되지 않은 경우, 공구를 자체 축 주위로 회전시켜 특정 지점에 로봇을 정확히 위치시킬 수 있는 무한한 가능성이 있습니다. 이를 통해 접근이 어려운 영역에 대한 유연성이 향상되고, 다양한 기구학적 특이점을 회피하며, 장비 구성 요소 간의 기계적 충돌을 방지할 수 있습니다. 자세히 보기자세히 보기
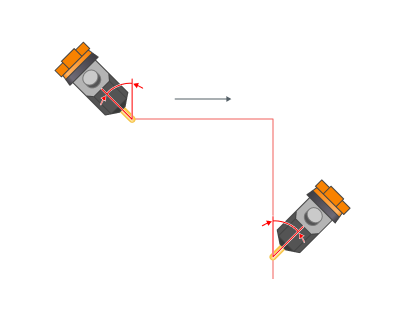
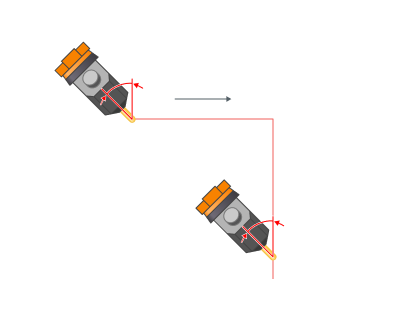
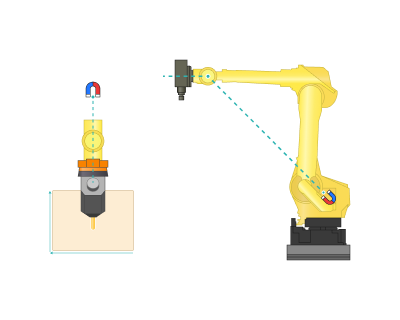
점으로 직접.
이 모드에서는 가공 중 5번째 축과 6번째 축의 교차점을 최소 거리로 끌어당기는 3D 점을 지정합니다.
점.
로봇 베이스 점. 로봇 베이스 점. 이 모드에서는 점이 로봇의 홈/베이스 점에 위치합니다.
로봇 엘보 점. 로봇 엘보 점. 이 모드에서는 점이 로봇의 엘보 점에 위치합니다.
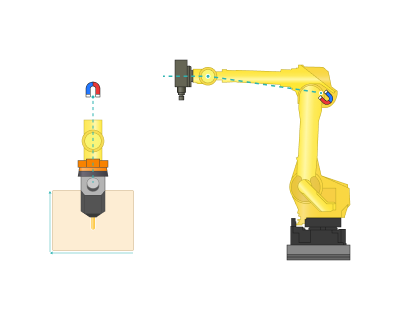
사용자 정의. 이 모드에서는 점의 위치가 사용자의 지시에 따라 결정됩니다.
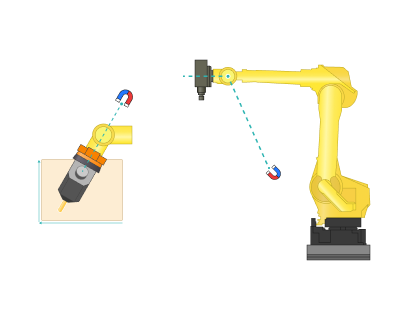
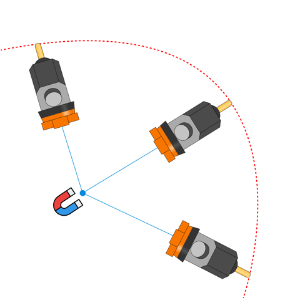
고정 벡터.
이 모드에서는 로봇 베이스 좌표계에서 로봇 플랜지(6번째 축)의 원하는 방향을 정의합니다.
벡터. 벡터. 로봇 6번째 축의 벡터입니다.
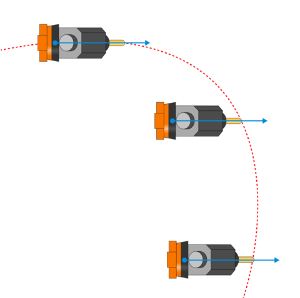
공구 경로
이 모드에서는 TCP의 한 축이 공구 경로 방향에 정렬됩니다.
각도 편차. 각도 편차. 공구를 따른 6번째 축의 추가 각도를 정의합니다.
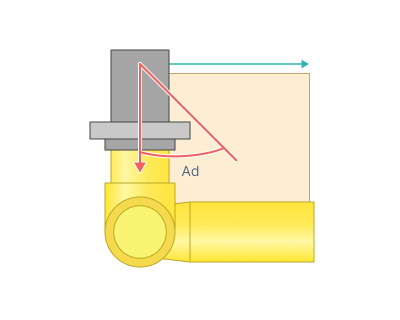
접선 근사.
고정 리드 방향. 고정 리드 방향. 선택한 글로벌 좌표계에 대해 맵(경사각, 리드각)에서 선택한 각도로 공구의 이동을 고정합니다.