로봇 6축 프로그래밍
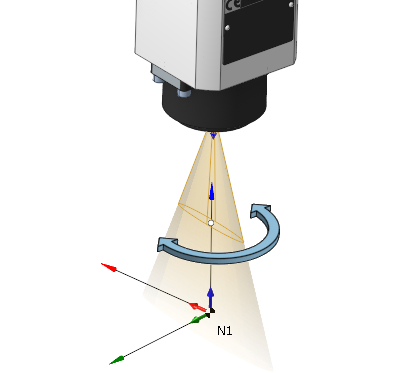
공작물에 대해 회전 공구를 위치시키려면 5자유도면 충분하지만, 대부분의 로봇은 6자유도를 갖습니다. 마지막 6번째 자유도(DOF)는 공구 플랜지의 추가 관절로 표현되며, 로봇의 유연성과 도달 영역을 확장하는 데 사용됩니다(공구의 위치와 방향을 고정한 상태에서 6번째 관절의 각도를 변경하면 로봇의 다른 관절이 움직이므로, 가공 시 다양한 유형의 기구학적 및 기계적 충돌을 방지하는 데 도움이 됩니다).
CAM 시스템에서 6축을 프로그래밍하는 방법은 두 가지가 있습니다:
자동,
수동.
작업 속성 인스펙터에서 이를 제어할 수 있습니다.
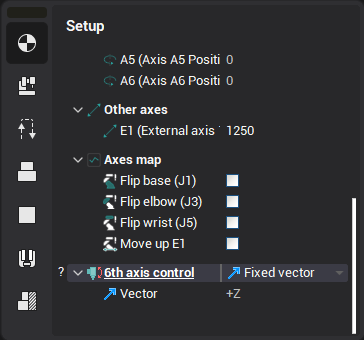
자동 방식은 6축 제어 속성의 여러 모드로 구성됩니다.자동 방식6축 제어
<고정 벡터>,
<점 방향 지정>
<공구경로>.툴패스
고정 벡터 6번째 축 제어 모드
이 모드에서는 로봇 공구 플랜지의 Z축(공구 플랜지 벡터)이 정렬되는 축(3D 벡터)을 정의합니다.
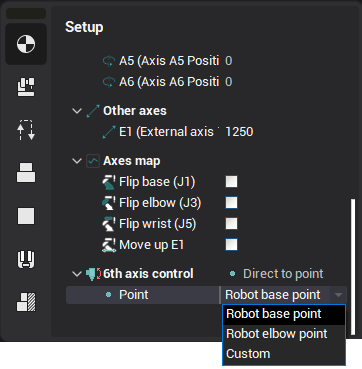
점으로 직접 6번째 축 제어 모드
이 모드에서는 가공 중 로봇의 공구 플랜지 벡터가 향하는 3D 점을 지정합니다.
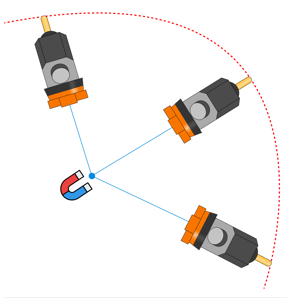
해당 점은 다음 중 하나일 수 있습니다:
로봇 베이스 점, 또는
로봇 엘보 점,
또는 사용자 정의 점.
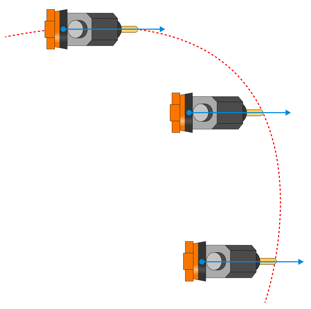
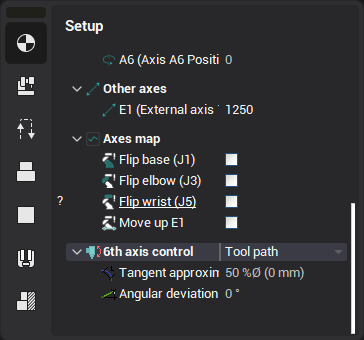
툴패스 6번째 축 제어 모드
이 모드에서는 TCP의 한 축이 공구경로 접선 방향에 정렬됩니다.
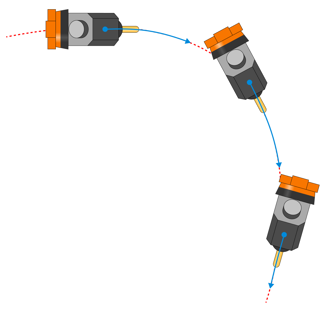
선택적으로 접선 근사 공차와 각 점에서 공구경로 접선에 대한 일정 각도 편차를 정의할 수도 있습니다.접선 근사 공차일정 각도 편차
6축의 수동 프로그래밍 방식은 로봇 축 맵(로봇 추가 축 최적화기)을 사용하는 것입니다. 두 가지 접근 방식을 결합할 수도 있습니다: 공구경로의 대부분에는 자동 법칙을 사용하고, 로봇 축 맵에서 6축 제어에 추가 보정을 적용할 수 있습니다.수동 방식로봇 축 맵