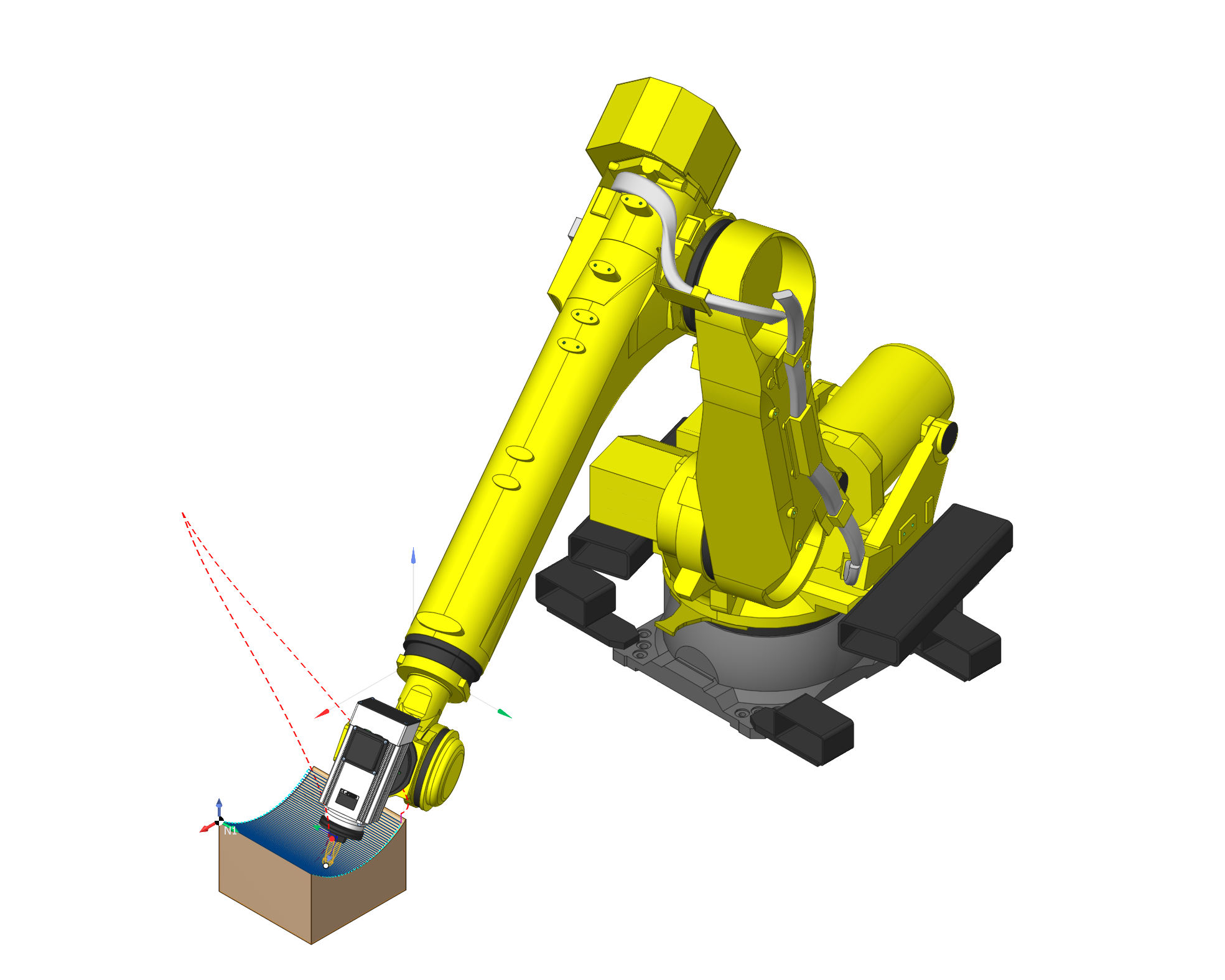
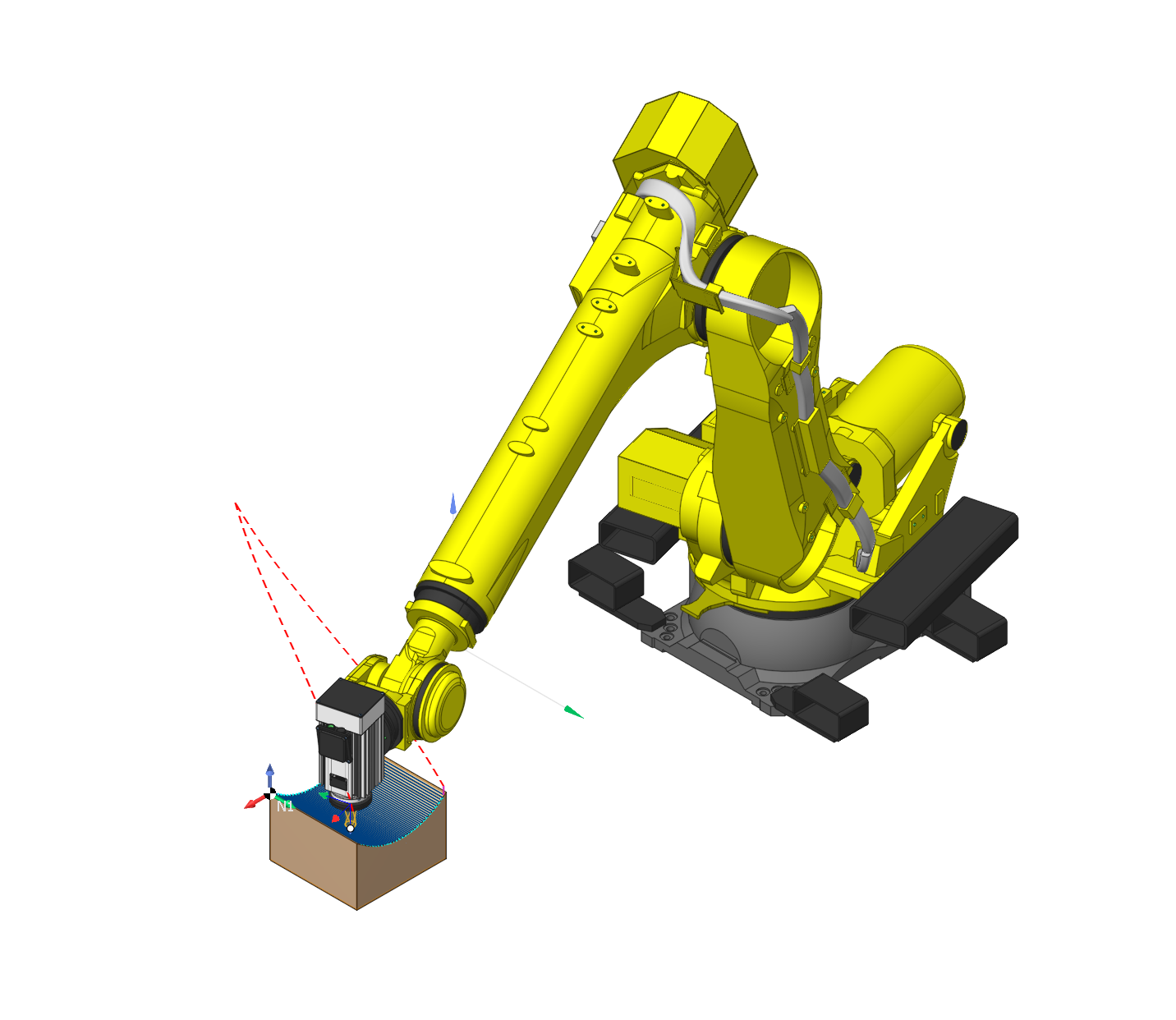
로봇 축 맵
적용 범위:
로봇 축 맵은 로봇의 여유 자유도(6번째 축, 레일 축, 회전 테이블 축)에 대한 수동 제어 법칙을 정의하고 자동 제어 법칙을 미세 조정할 수 있습니다. 이 피처는 작업 셋업에서 로봇 축 맵 파라미터 옆의 말줄임표 버튼을 눌러 사용할 수 있습니다.
다음 축/파라미터를 축 맵을 통해 제어할 수 있습니다:
로봇 외부 축(회전 테이블 또는 레일). 보다 정확히는, 작업의 공구 또는 공작물 위치에 영향을 미치는 로봇 축 중 관절(A1-A5 축)이 아닌 축입니다.
로봇 A6 축
리드/린 각도
5축 공작 기계의 "C축" (자세한 내용은 여기를 참조하십시오)여기
임의 공작 기계 축 - 특수 플래그 사용. 자세한 내용은 "임의 공작 기계 파라미터 제어" 섹션을 참조하십시오.임의 공작 기계 파라미터 제어
작동 원리
로봇 구성
먼저 작업에 사용할 로봇 구성/상태를 선택해야 합니다. 이는 작업 셋업의 로봇 축 맵 파라미터에서 편집할 수 있는 것과 동일한 구성/상태입니다. 로봇 구성은 "플립"으로 정의됩니다. 플립은 공작물에 대한 공구의 동일한 위치를 허용하는 로봇 관절(베이스, 엘보, 손목)의 대체 위치이며, 레일 및 회전 테이블과 같은 여유 축의 위치 결정 모드(이동 위 E1, 회전 E2)를 포함합니다.
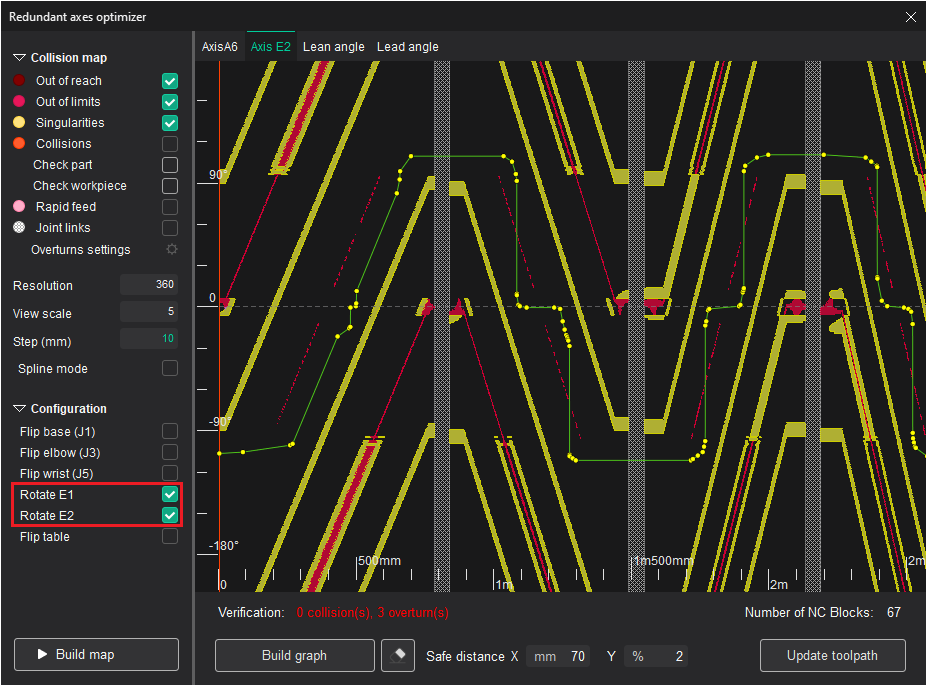
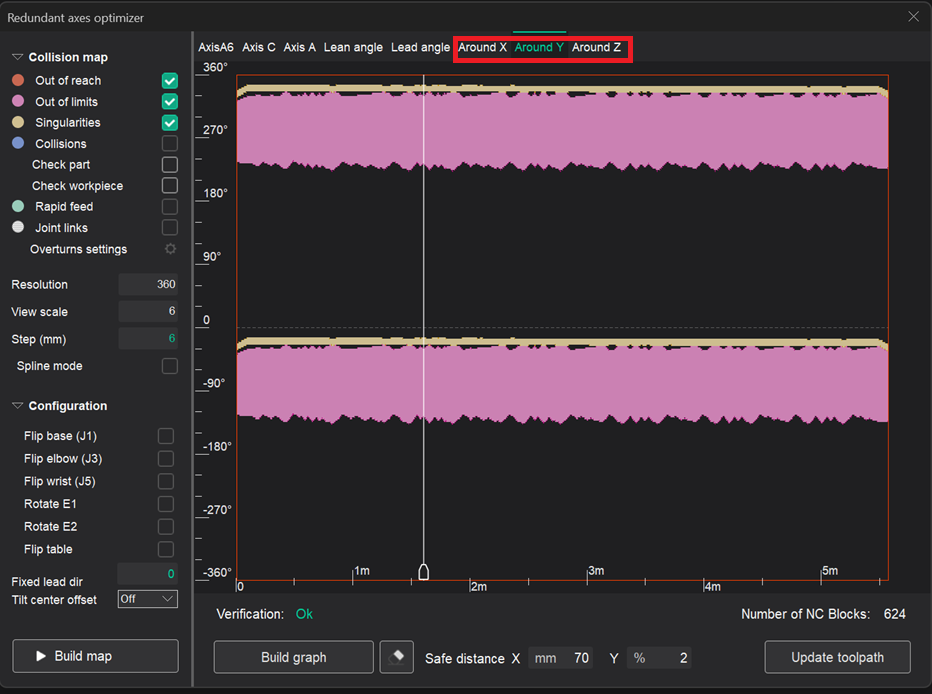
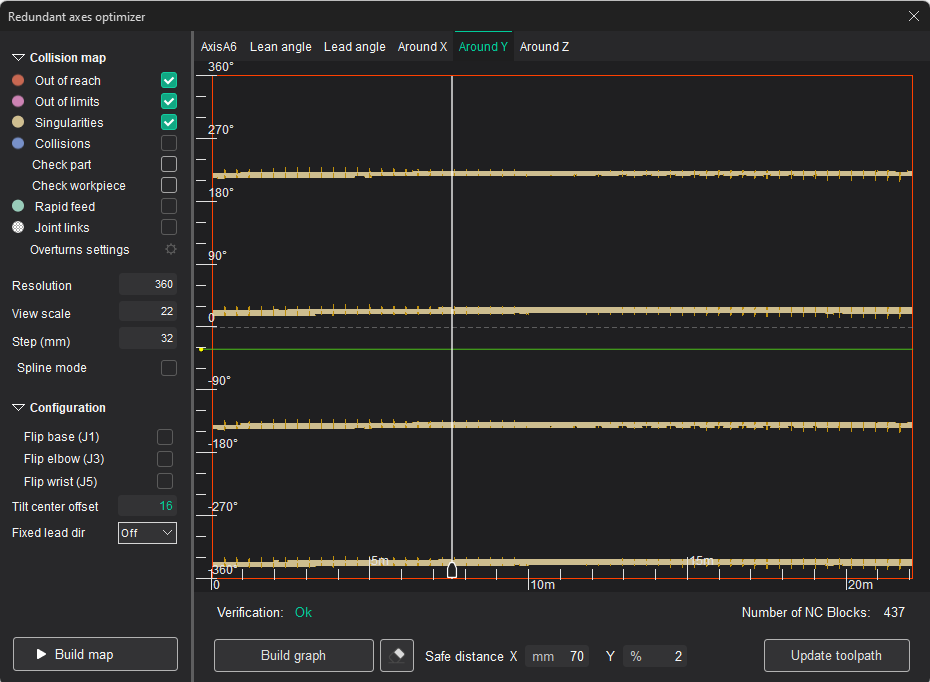
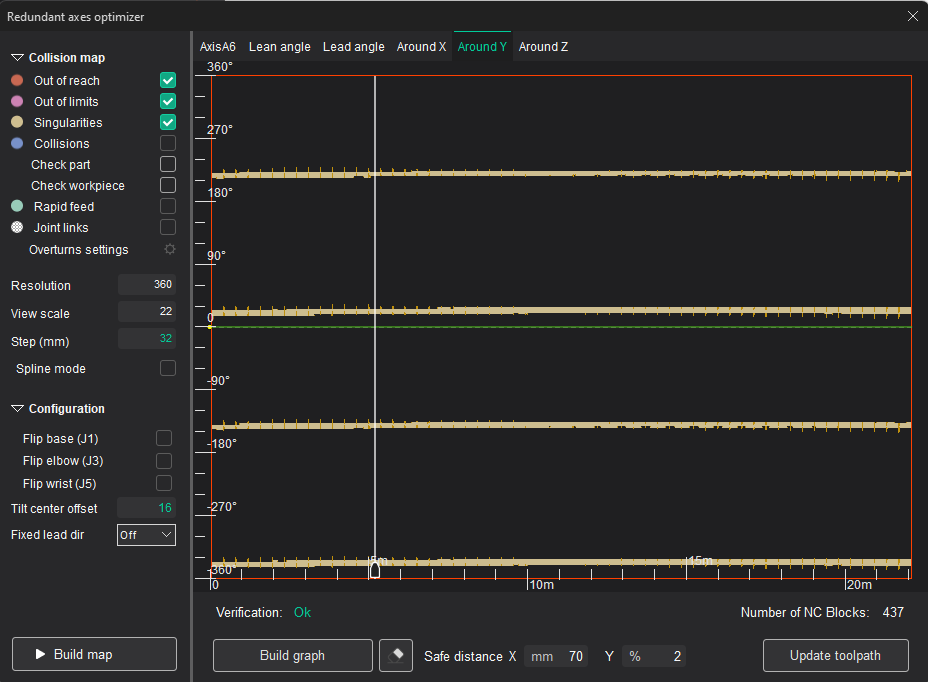
최적화 축
최적화 축 콤보 박스에서 현재 제어 법칙을 정의할 축을 선택합니다.
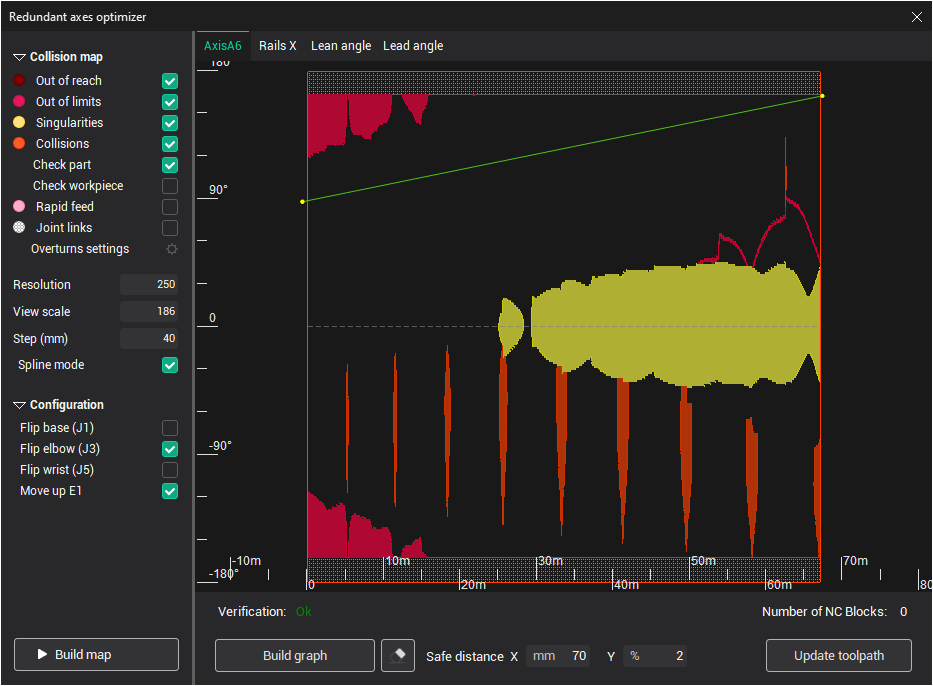
충돌 맵
충돌 맵은 공구경로에서 충돌 영역을 시각적으로 표현한 것입니다. X축은 공구경로 시작부터 길이로 측정한 공구의 위치이고, Y축은 최적화 축의 값입니다. 다음 유형의 충돌이 감지됩니다.
도달 불가 영역(적갈색)은 로봇이 도달할 수 없는 영역입니다.
한계 초과 영역(보라색)은 로봇이 도달할 수 있지만 일부 로봇 축이 정의된 한계를 벗어나는 영역입니다.
특이점 영역(노란색)은 로봇 관절이 극단적인 속도로 움직이는 영역입니다.
충돌 영역(주황색)은 로봇 부품이 서로 또는 공작물과 충돌하는 영역입니다.
맵 해상도는 해상도 상자에서 Y축을 따라 계산할 스텝 수로 설정할 수 있습니다.
맵을 생성하거나 새로고침하려면 맵 생성 버튼을 누르십시오.
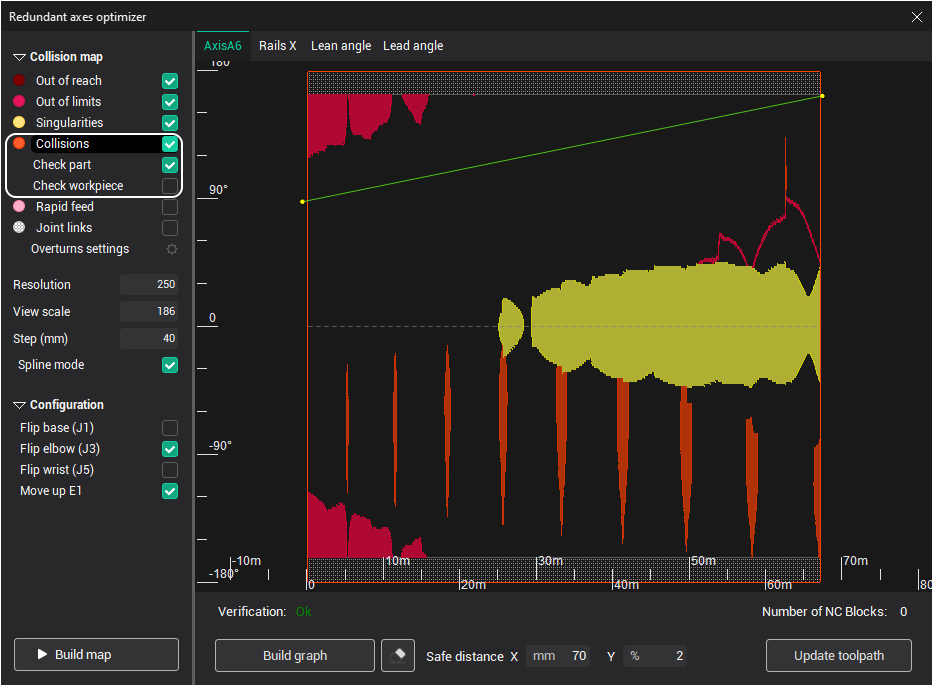
파트 및 공작물 확인
'충돌' 체크박스 아래에 충돌 감지 시 파트 및/또는 공작물을 고려할지 지정하는 2개의 체크박스가 있습니다. 상위 '충돌' 체크박스가 'True'로 설정된 경우에만 활성화됩니다. 가공 유형(절삭, 적층 가공, 용접)에 따라 전환하는 것이 좋습니다.
축 제어 스플라인
축 제어 법칙은 스플라인 곡선으로 정의됩니다. 기본적으로 스플라인은 없습니다. 이는 최적화 축 값이 전체 공구경로에서 동일하게 유지(수동 모드)되거나 자동으로 제어(자동 모드)됨을 의미합니다(수평 회색 점선).
목표는 충돌이 없는 흰색 영역을 왼쪽에서 오른쪽으로 통과하는 가장 매끄러운 곡선을 만드는 것입니다.
새 스플라인을 생성하려면 스플라인이 통과해야 할 빈 공간의 점을 더블 클릭하십시오. 두 점이면 충분합니다. 스플라인이 생성된 후 마우스로 스플라인 제어점을 드래그하거나, 제어점을 마우스 오른쪽 클릭하여 삭제하거나, 마우스로 스플라인을 당겨 새 점을 추가하여 형상을 변경할 수 있습니다.
스플라인을 지우려면 지우기 버튼을 사용하십시오.
충돌 회피 스플라인을 자동으로 생성하려면 자동 생성 버튼을 사용하십시오.
검증
이 영역에는 현재 공구경로의 상태가 표시됩니다. 공구경로에 충돌이 없으면 녹색 확인가 표시되고, 충돌이 있으면 충돌 수가 빨간색으로 표시됩니다. 축 제어 스플라인을 변경할 때마다 상태가 업데이트됩니다.
동시에 그래픽 뷰에서 실제 공구경로 곡선의 충돌 영역도 해당 충돌 유형 색상의 굵은 선으로 표시됩니다.
축 맵의 빈 공간을 클릭하거나 마우스 왼쪽 버튼을 누른 채 마우스를 이동하여 공구를 공구경로의 해당 위치로 이동시킬 수 있습니다.
공구경로 재생성
축 제어 법칙을 공구경로에 적용하려면 공구경로 재생성 버튼을 클릭하십시오.
회전축 오버턴 감지 및 회피
여유 축 맵을 사용하여 회전축 오버턴으로 인한 공구경로의 잠재적 문제를 확인할 수 있습니다. 오버턴은 회전축이 한계에 도달하여 가공을 계속하기 위해 전방 또는 후방으로 1회전(360°)해야 할 때 발생합니다. 이전 버전에서는 오버턴이 발생해도 축이 항상 한계 내에 있었기 때문에 오버턴에 대한 정보가 사용자에게 제공되지 않았습니다.오버턴°
밝은 점선과 어두운 실선은 스플라인이 교차할 경우 공구경로에서 오버턴이 발생할 수 있는 위치를 나타냅니다. 오버턴이 발생할 수 있는 각 회전축은 서로 다른 선 색상을 가집니다. 교차가 항상 오버턴에 해당하는 것은 아니며, 실제 오버턴 위치는 스플라인에서 "오버턴" 표시가 있는 굵은 빨간색 점으로 추가 강조 표시됩니다. 또한 공구경로에 오버턴이 있는 경우, 그 수가 "검증" 상태 표시줄에 표시됩니다. 오버턴에는 2가지 유형이 있습니다:
축 최솟값에 도달한 후 오버턴이 발생합니다(점선으로 표시) 최솟값점선
축 최댓값에 도달한 후 발생합니다(실선으로 표시) 최댓값실선
"맵 범례 표시" 체크박스를 전환하여 오버턴 선 색상/스타일 정보 및 기타 추가 맵 표기를 확인하십시오.맵 범례 표시
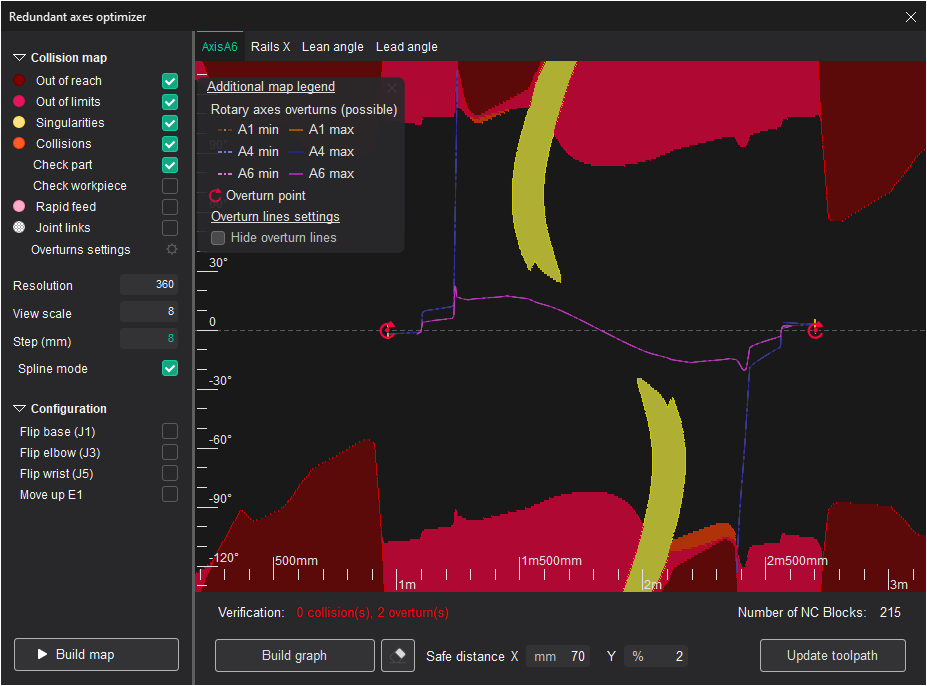
스크린샷 1스크린샷 1. 공구경로에 2개의 오버턴이 포함됨
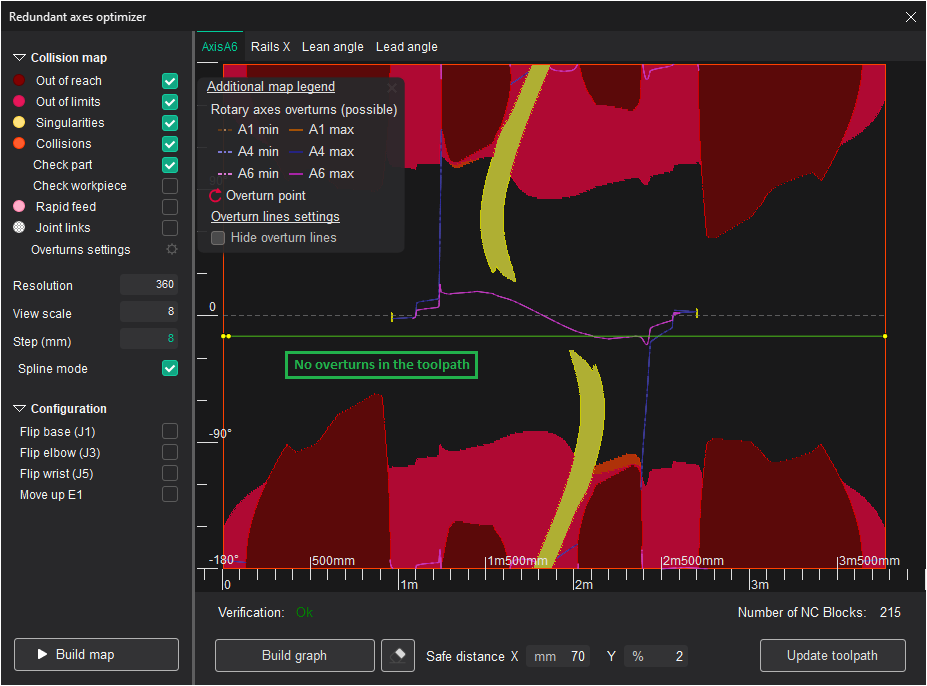
스크린샷 2스크린샷 2. 스플라인을 아래로 이동하여 오버턴 선과 교차하지 않게 했습니다. 그 결과 공구경로에 더 이상 오버턴이 없습니다.
작업의 공구경로에 오버턴이 포함된 경우, 스플라인을 이동하여 해당 선과 교차하지 않도록 하거나 교차가 "가짜"(해당 점에서 회전축 값이 아직 한계에 도달하지 않았지만 값이 축 최소/최대의 360° 모듈로와 같음)가 되도록 하여 오버턴을 회피할 수 있습니다.회피°
위 스크린샷에서 스플라인을 파란색/보라색 선과 교차하지 않는 직선으로 변경하여 공구경로의 오버턴을 제거했습니다. 또한 로봇 구성("엘보 플립", "손목 플립" 파라미터)을 변경하는 것도 오버턴 회피에 도움이 될 수 있습니다.
임의 공작 기계 파라미터 제어
임의 파라미터(공작 기계 스키마에서 축으로 정의된)의 변경을 제어해야 하는 경우, 해당 공작 기계 상태 파라미터에서 "맵으로 강제 제어" 플래그를 활성화할 수 있습니다.맵으로 강제 제어
이 플래그는 인스펙터의 "공작 기계 셋업 → 공작 기계 상태 파라미터" 섹션에서 각 공작 기계 상태 파라미터에 대해 사용할 수 있습니다. 이후 해당 축이 축 맵 창에 나타나며, 평소와 같이 스플라인을 사용하여 각 공구경로 점에서 파라미터 값을 정의할 수 있습니다.기계 설정 → 기계 상태 파라미터
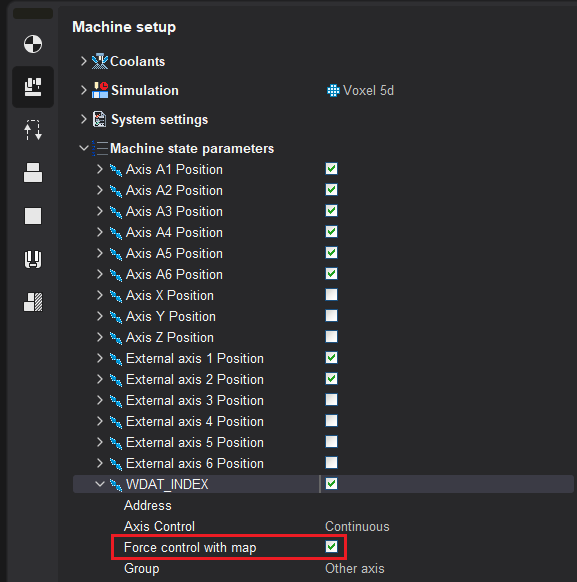
공작 기계의 xml 파일에서 해당 축에 대응하는 <기계 상태 파라미터>에 직접 이 플래그를 설정할 수도 있습니다.
<SCType ID="WDATPOS" Caption="WDAT_INDEX" type="TMachineStateParameter"> ... <ControlWithMap DefaultValue="True"/></SCType>로봇 2축 회전 테이블의 특이점 회피
이전에는 로봇의 2축 회전 테이블 궤적을 정의해야 하고 두 회전 테이블 플립(일반적으로 "회전 E1"과 "회전 E2"로 불림)이 모두 활성화된 경우, 결과 궤적에 특이점 영역이 포함되어 회전 테이블 상태가 급격히 변할 수 있었습니다. 이러한 이유로 이 경우 축 맵에서 5축 공작 기계용 축 맵과 유사한 특수 모드가 활성화됩니다. 이 모드에서는 회전 테이블 축 중 하나에 대해서만 궤적을 정의하면 되며, 나머지 축의 값은 작업에서 정의한 공구 법선으로부터의 편차를 최소화하도록 자동으로 계산됩니다.5축 공작 기계용 그래프 생성
맵의 흰색 수직 영역은 특이점 영역에 해당합니다. 스플라인을 사용하여 급격한 변화 없이 E2 축 궤적을 정의할 수 있습니다.
로봇 맵에서 LocalCS 기준 공구경로 회전 피처
고정 좌표계를 기준으로 회전 맵을 구성할 수 있습니다.
다음은 Y축 회전의 예시입니다.
관련 항목: