산업용 로봇 가공
CAM 시스템은 산업용 로봇(다관절)의 절삭, 밀링 가공, 도장, 용접 및 기타 응용 분야 프로그래밍에 사용할 수 있습니다. 산업용 로봇의 프로그래밍 과정은 기본적으로 일반 밀링 공작 기계와 동일하지만, 로봇은 일반적으로 6자유도를 가집니다(공작물에 대한 커터 위치 결정에 필요한 5자유도와 비교). 또한 회전 테이블과 같은 다양한 유형의 공작물 포지셔너 및 레일과 같은 로봇 포지셔너의 추가 자유도를 선택적으로 사용할 수 있습니다. 따라서 로봇과 함께 사용할 경우 CAM 시스템 작업은 이러한 여분의 자유도(DOF)를 제어하기 위한 추가 파라미터 세트를 제공합니다.밀링 공작 기계
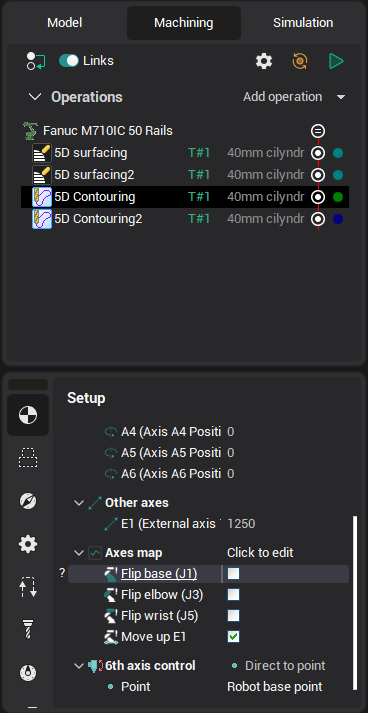
여분의 자유도 외에도 로봇은 공작물에 대한 공구의 원하는 위치에 여러 다른 상태로 도달할 수 있습니다. 작업에 사용할 상태는 작업 셋업에서 <flip base>, <flip elbow>, <flip wrist> 체크박스로 지정할 수 있습니다.
이 장에서는 다음과 같은 로봇 프로그래밍 기능을 다룹니다:
이 피처는 다음 CAM 시스템 구성에서 사용할 수 있습니다:CAM 시스템 구성
Robots
Master
Pro