로봇 전환 동작 프로그래밍 (구 방식)
작업 간 로봇 전환 동작의 프로그래밍은 작업 셋업에서 접근 점과 복귀 점을 지정하여 수행합니다. 시뮬레이션 모드의 동작 편집 도구 모음을 통해 간단하게 설정할 수 있습니다.동작 편집 도구 모음
다음 예제를 살펴보겠습니다.
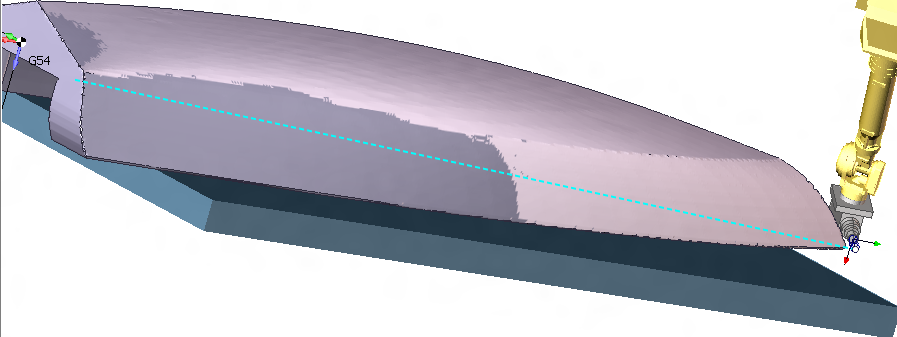
작업 계산이 완료된 후, 시뮬레이션 결과 두 작업 간의 전환 동작이 파트에 가우지를 발생시키는 것으로 확인되었습니다. 전환 동작을 수정하려면 로봇이 통과할 중간 점 목록을 구성해야 합니다.
이를 수행하는 가장 좋은 방법은 공작 기계 제어 패널을 사용하는 것입니다.
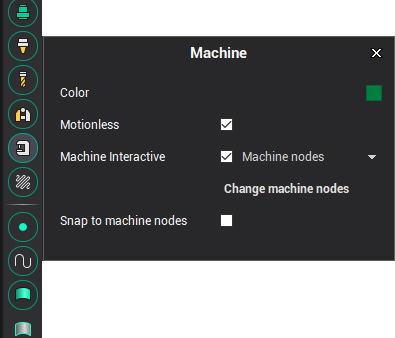
먼저 <MachineInteractive> 모드가 활성화되어 있는지 확인하십시오.기계 Interactive
<시뮬레이션> 탭에서 아래 그림과 같이 첫 번째 작업(5D 윤곽 가공)의 마지막 명령을 선택합니다. 첫 번째 제어 점을 정의하려면 마우스로 공구를 원하는 위치로 드래그합니다.
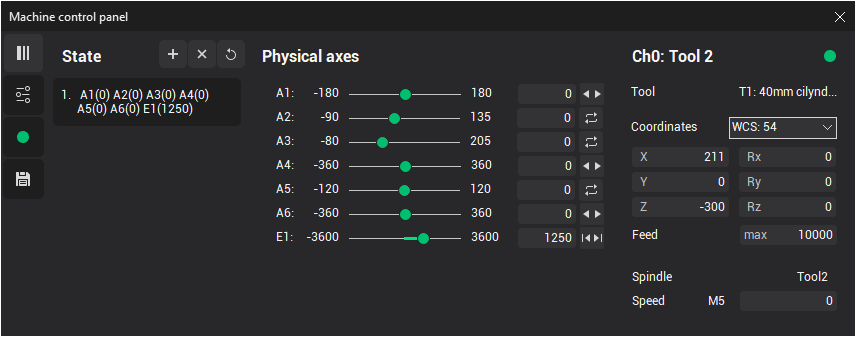
그런 다음 <기계 조작 패널>에서 <상태 패널 가시성> 버튼을 눌러 해당 위치를 메모리에 저장합니다.상태 패널 가시성기계 조작 패널
나머지 중간 전환 점에 대해서도 동일한 단계를 반복합니다.
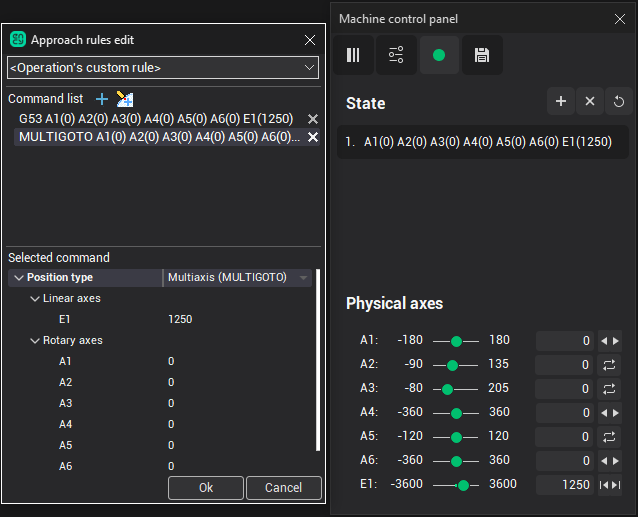
그 후 <기술> 탭으로 전환하고, 작업 트리에서 첫 번째 작업(5D 윤곽)을 활성화한 다음, 아래 그림과 같이 작업 셋업의 복귀 파라미터 드롭다운에서 <사용자 정의...>을 선택합니다.
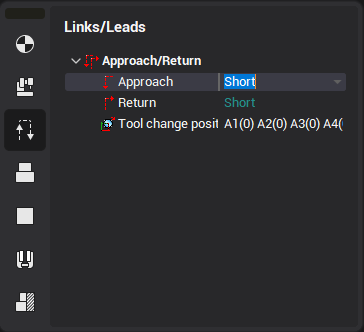
<기계 조작 패널>이 열려 있는지 확인합니다. 공작 기계 제어 패널에서 첫 번째로 저장된 제어 점을 선택합니다. 로봇이 저장된 상태로 위치하게 됩니다. 그런 다음 아래 그림과 같이 <접근/복귀 points list edit> 창에서 <현재 상태 추가> 버튼을 눌러 현재 로봇 위치를 복귀 중간 점으로 추가합니다.
축 값의 정확한 수치가 중요하지 않은 경우에는 목록을 구성하지 않고 제어 점을 직접 추가할 수 있습니다.
마찬가지로 두 번째 작업(5d Contouring2)의 접근 시퀀스도 정의할 수 있습니다.