공구 및 공작물 좌표계 설정
로봇 프로그래밍 시 공구 좌표계와 공작물 좌표계(공구 프레임 및 사용자 프레임)를 정의해야 합니다.
공구 좌표계 정의
공구 좌표계는 로봇 플랜지 기준 좌표계에 대한 공구 좌표계의 원점, 회전 각도, 공구 돌출 길이를 지정하여 정의합니다.
1. 프로젝트에 대한 공구 헤드의 위치 및 방향 설정
첫 번째 단계로 로봇 매뉴얼의 지침에 따라 실제 로봇에서 공구 좌표계 캘리브레이션을 수행합니다. 캘리브레이션 후 공구 좌표계의 양의 Z축이 공구 돌출 방향을 향하는지 확인하십시오.
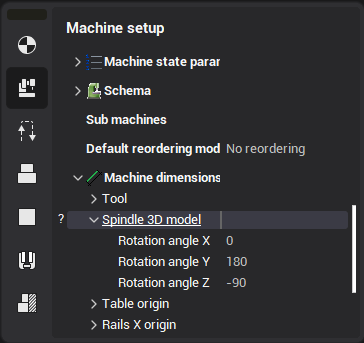
CAM 시스템의 기술 탭에서 작업 트리의 로봇 노드를 선택하고, 인스펙터의 공작 기계 셋업 탭에서 공구 좌표계 캘리브레이션으로 얻은 값을 <기계 치수.공구> 필드에 입력합니다(아래 첫 번째 그림 참조). 회전 각도 A, B, C (W, P, R) 값은 일반적으로 공구 헤드 구성이 변경(공구 헤드를 수정하거나 교체)된 경우에만 업데이트하면 됩니다.
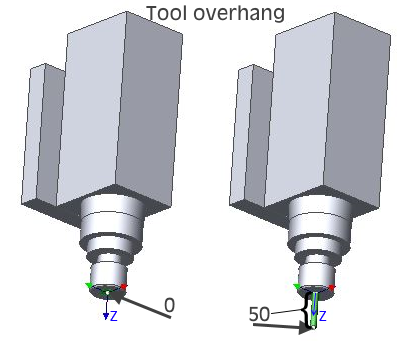
로봇 캘리브레이션 시 공구를 사용한 경우(두 번째 그림 참조), 공구 길이를 <공구 돌출> 필드에 입력하고, 그렇지 않으면 이 필드를 0으로 두십시오.
<스핀들 3D 모델> 파라미터는 공구 좌표계에 대한 공구 헤드 3D 모델의 추가 변환을 정의합니다(시각화 및 시뮬레이션용). 이 파라미터는 공구의 방향이나 생성되는 공구경로에 영향을 주지 않습니다.
입력한 값을 모든 새 프로젝트에서 현재 로봇의 기본값으로 사용하려면 로봇의 .xml 파일을 편집해야 합니다. 예:
<X DefaultValue="134.83"/>).
2. 작업에 대한 공구 돌출 길이 설정
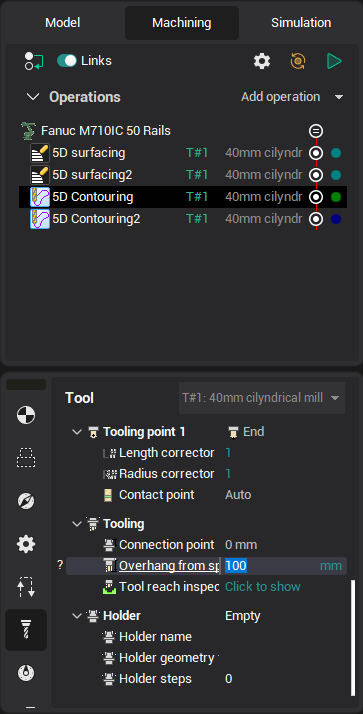
프로젝트의 작업에서 사용할 새 공구마다 공구 돌출 길이를 지정해야 합니다. 이를 위해 작업 파라미터 인스펙터에서 <공구> 탭을 활성화하고 <오버행> 파라미터를 클릭합니다(아래 그림 참조). 그래픽 뷰에 공구 돌출 길이(연두색 치수)와 공구 플랜지 좌표계에서의 공구 중심점(TCP) 3개 좌표(X-빨강, Y-초록, Z-파랑)가 표시됩니다. 치수를 클릭하고 키보드로 값을 입력하거나 마우스 휠 스크롤로 편집할 수 있습니다. 4개 치수는 서로 연관되어 있어 하나를 편집하면 공구 돌출 길이만 변경되도록 나머지 값이 재계산됩니다.
좌표계 정의 방법의 차이
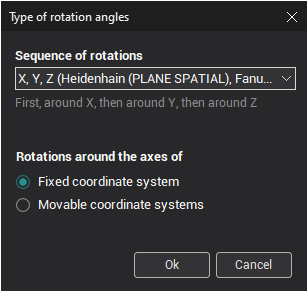
제조사마다 로봇의 좌표계 회전 각도 정의 방식이 다를 수 있습니다. 예를 들어, Fanuc 로봇은 X축, Y축, Z축 순서로 회전하고, KUKA 로봇은 Z축, Y축, X축 순서로 회전합니다.
CAM 시스템에서는 특정 로봇에 맞는 올바른 회전 순서가 기본적으로 사용됩니다. 그러나 비표준 회전 방식으로 좌표계를 정의하려면 <회전 각도 유형> 창에서 회전 방식을 선택할 수 있으며, 이 창은 <새 좌표계 정의>, <공간 변환>, <공작물 설정> 대화 상자에서 해당 버튼을 눌러 접근할 수 있습니다.
공작물의 사용자 좌표계 정의
권장 방법은 다음과 같습니다.
1) 실제 로봇에서 공작물의 세 점을 지정하여 새 사용자 좌표계를 정의합니다(대부분의 로봇이 이 방식을 지원합니다). 첫 번째 점은 좌표계 원점이고, 두 번째와 세 번째 점은 X축 및 Y축 방향을 지정합니다. 그 결과로 좌표계의 ID(번호)와 좌표계 파라미터 XYZ ABC (WPR, RxRyRz, q1q2q3q4)를 얻게 됩니다.
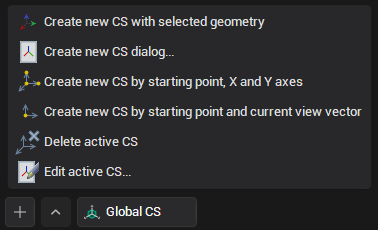
2) CAM 시스템에서 실제 로봇에서 사용한 것과 동일한 방법으로 새 좌표계를 생성합니다:
<시작점 좌표계와 X·Y축 방향을 설정하여 좌표계 생성> 명령을 선택하여 새 좌표계를 생성하고, 실제 로봇에서 사용자 좌표계를 정의할 때 사용한 공작물 모델의 동일한 세 점을 클릭합니다.
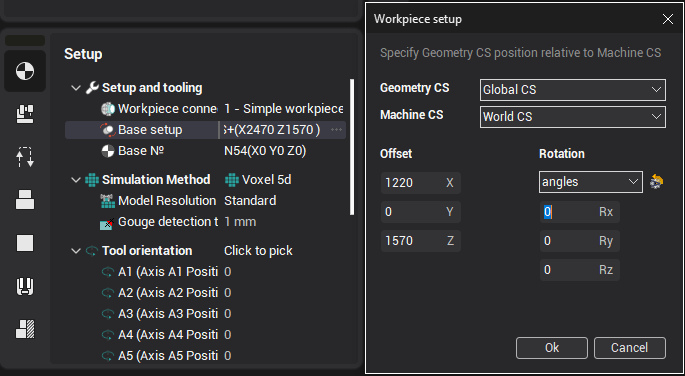
<공작물 설정> 대화 상자에서 새로 생성한 좌표계를 <기하학적 좌표계>로 선택합니다. 이동 및 회전 입력란에 로봇에서 얻은 XYZ ABC (WPR, RxRyRz, q1, q2, q3, q4) 값을 입력합니다.
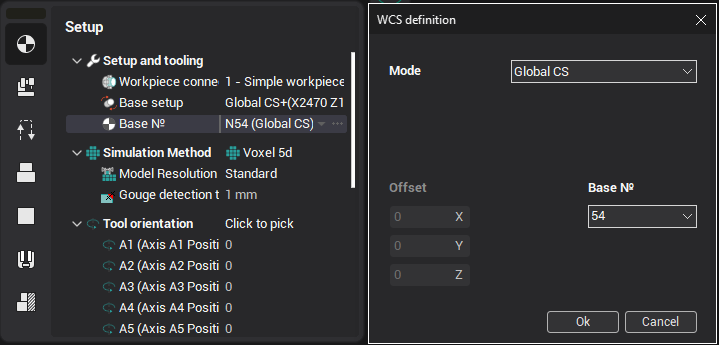
<공작물 좌표계> 대화 상자에서 <모드(지정 방법):>에 대해 새로 생성한 좌표계를 선택합니다. 프로그램에서 사용할 좌표계 번호를 <LCS 번호> 입력란에 입력합니다. (기본값은 대부분의 공작 기계에서 표준 좌표계인 54입니다.)
이후 CAM 시스템에서의 공작물 및 고정구 위치는 실제 로봇에 대한 실제 공작물의 위치를 반영해야 합니다.
사용자 공작물 좌표계는 작업이 아닌 작업 트리의 루트(트리에서 로봇 아이콘과 캡션이 있는 최상위 항목)에서 설정하는 것을 권장합니다.
3) 사용자 좌표계의 위치는 로봇 .xml 파일에 새 프로젝트의 기본값으로 저장할 수 있습니다. 이렇게 하면 새로 가져온 파트 모델이 로봇에 대해 더 예측 가능한 위치에 배치되므로 CAM 시스템의 사용이 편리해집니다.