산업용 로봇 가공
CAM 시스템은 절단, 밀링, 페인팅, 용접 및 기타 응용 분야를 위한 산업용 로봇(관절형)을 프로그래밍하는 데 사용할 수 있습니다. 산업용 로봇의 프로그래밍 과정은 기본적으로 기존 로봇과 동일합니다. 밀링 머신단, 로봇에는 일반적으로 6개의 자유도(공작물을 기준으로 커터를 배치하는 데 필요한 5개의 자유도)와 선택적으로 다양한 유형의 공작물 포지셔너(예: 회전 테이블) 및 로봇 포지셔너(예: 레일)의 추가 자유도가 있습니다. 따라서 로봇 CAM 시스템 작업과 함께 사용할 경우 과도한 자유도(DOF)를 제어하기 위한 추가 매개변수 세트를 제공합니다.
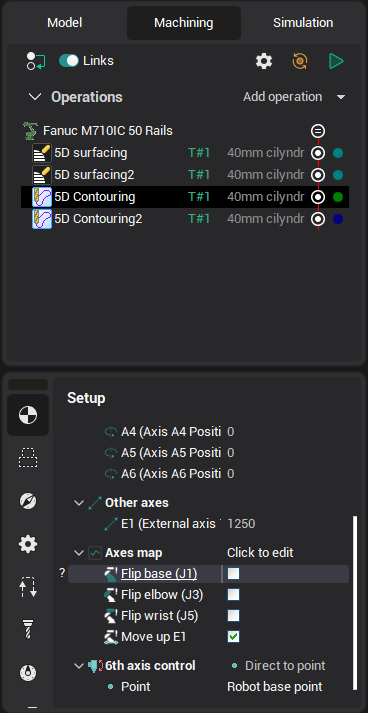
과도한 자유도 외에도 로봇은 다양한 상태에서 공작물을 기준으로 원하는 도구 위치에 도달할 수 있습니다. 작업에 사용할 상태는 작업 설정에서 <플립 베이스>, <플립 엘보우>, <손목 플립> 체크박스를 통해 지정할 수도 있습니다.
이 장에서는 다음과 같은 로봇 프로그래밍 피처를 다룹니다:
이 기능은 다음에서 사용할 수 있습니다. CAM 시스템 구성:
로봇
마스터
프로