레일 위치 프로그래밍
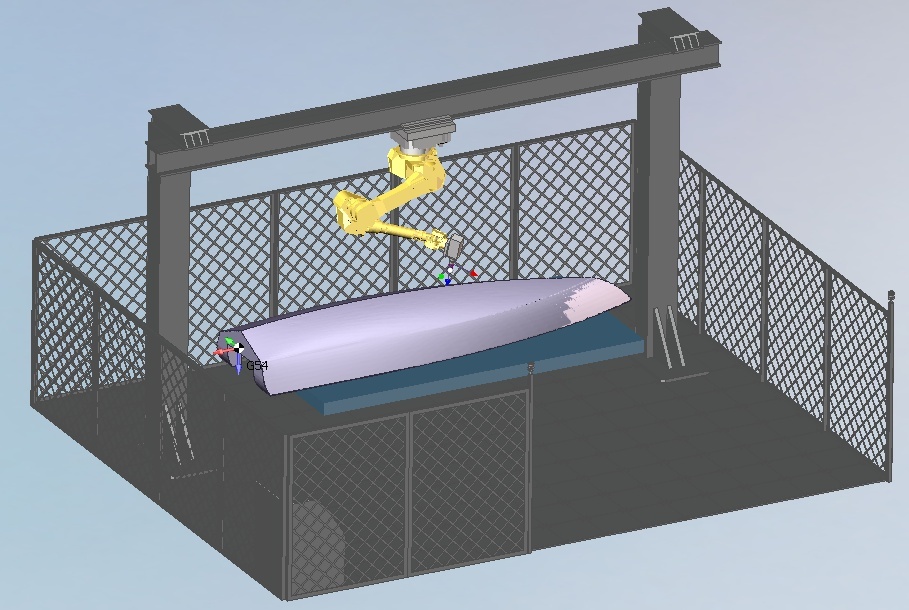
산업용 로봇의 도달 범위를 넓히기 위해 로봇을 레일에 장착하는 경우가 많습니다. CAM 시스템을 사용하면 최대 3개의 레일 포지셔너를 동시에 제어할 수 있습니다.
로봇 셀의 운동 체계에 하나 이상의 레일이 포함된 경우 작업 매개변수의 각 레일에 대해 다음 매개변수를 사용할 수 있습니다.
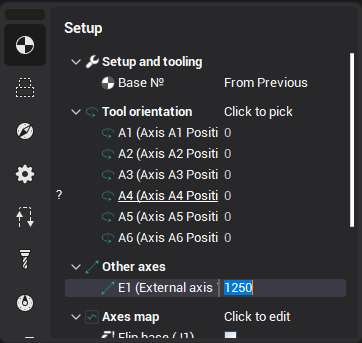
1. 작업을 위한 초기 레일 위치(그림의 E1(외부 축 1 위치)).
2. 이동 위 레일 축 모드 체크 박스(그림의 위로 이동 E1 체크 박스)
이동위 <레일축>
이 모드가 활성화되면 현재 도구 센터 프로그래밍 지점이 로봇 베이스 영점 아래에(또는 가능한 한 가깝게) 나타나는 방식으로 가공 중에 로봇이 레일에서 자동으로 이동합니다.
주목!
로봇 베이스 영점 바로 아래에 도구 중심점을 두는 것이 항상 최적입니다. 이 위치는 첫 번째 관절의 특이점으로 이어질 수 있습니다. 이 경우 로봇 축 맵에서 레일 위치를 조정해야 합니다(추가 이동 추가).