로봇 축 맵
응용프로그램 영역:
Rob Axes Map을 사용하면 로봇의 과도한 자유도(6번째 축, 레일 축, 회전 테이블 축)에 대한 수동 및 미세 조정 자동 제어 법칙을 정의할 수 있습니다. 이 기능은 로봇 축 맵 매개변수 옆에 있는 줄임표 버튼을 눌러 작업 설정에서 사용할 수 있습니다.
다음 축/매개변수는 축 맵을 통해 제어할 수 있습니다.
외부 축(회전 테이블 또는 레일). 보다 정확하게는 작업의 도구나 공작물 위치에 영향을 미치는 로봇 축으로 관절(A1~A5축) 중 하나를 집적해 놓은 것이다.
로비 A6축
리드/기울기 각도
5축 기계의 "C축"(참조: 여기 자세한 내용은)
임의 기계 축 - 특수 플래그 사용. "를 참조하십시오.임의의 기계 매개변수 제어" 섹션에서 추가 정보를 확인하세요.
작동 원리
로봇 구성
먼저 작업에 사용할 로봇 구성/상태를 선택해야 합니다. 로봇 축 맵 매개변수 아래의 작업 설정에서 편집할 수 있는 구성/상태와 동일합니다. 로봇 구성은 작업물에 대해 동일한 도구 위치를 허용하는 로봇 관절(베이스, 팔꿈치, 손목)의 대체 위치인 "플립"과 레일 및 회전 테이블과 같은 과도한 축의 위치 지정 모드(이동 위 E1, 회전 E2)로 정의됩니다.
최적화된 축
최적화된 축 콤보박스에서 현재 제어 법칙을 정의하는 축을 선택합니다.
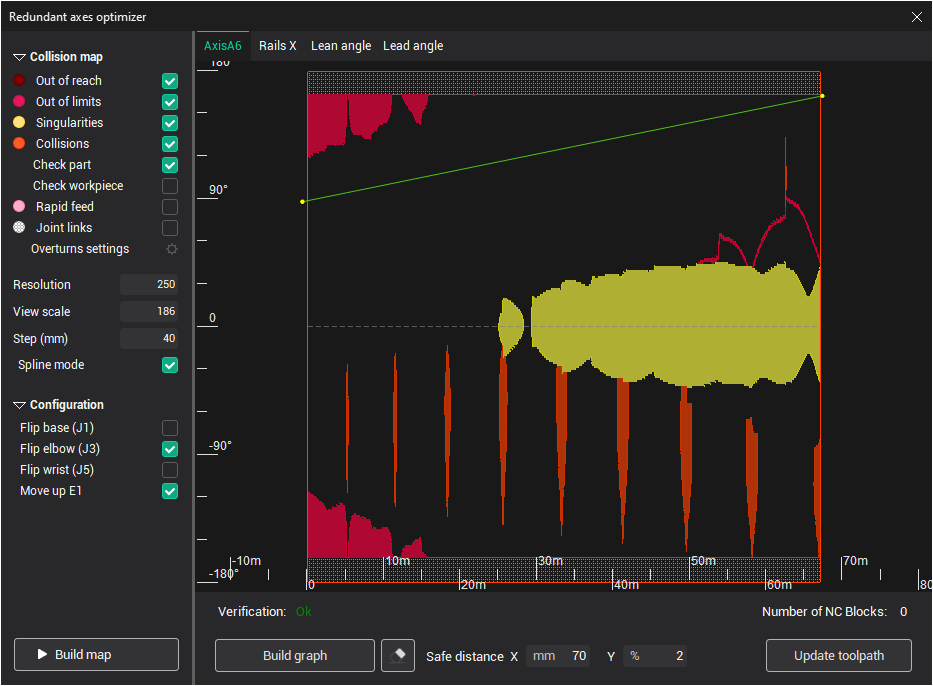
충돌 맵
충돌 카드는 도구 경로의 충돌 영역을 시각적으로 표현한 것입니다. X축을 따라 처음부터 길이로 측정된 도구 경로의 도구 위치입니다. Y축을 따라 최적화된 축의 값이 있습니다. 다음 유형의 충돌이 감지됩니다.
범위를 공격남 구역(maroon)은 로봇이 도달할 수 있는 구역입니다.
영역(보라색)은 로봇이 도달할 수 있지만 로봇 축 중 일부가 정의된 한계를 벗어나는 영역입니다.
특이점 영역(노란색)은 로봇의 관절이 극도의 속도로 움직이는 영역입니다.
충돌 영역(주황색)은 로봇 부품이 서로 충돌하거나 작업물과 충돌하는 영역입니다.
지도 해상도는 계산할 Y축을 따라 걷는 단계의 양만큼 상자에서 설정할 수 있습니다.
지도를 작성하거나 새로 고치려면 지도 생성 버튼을 누르세요.
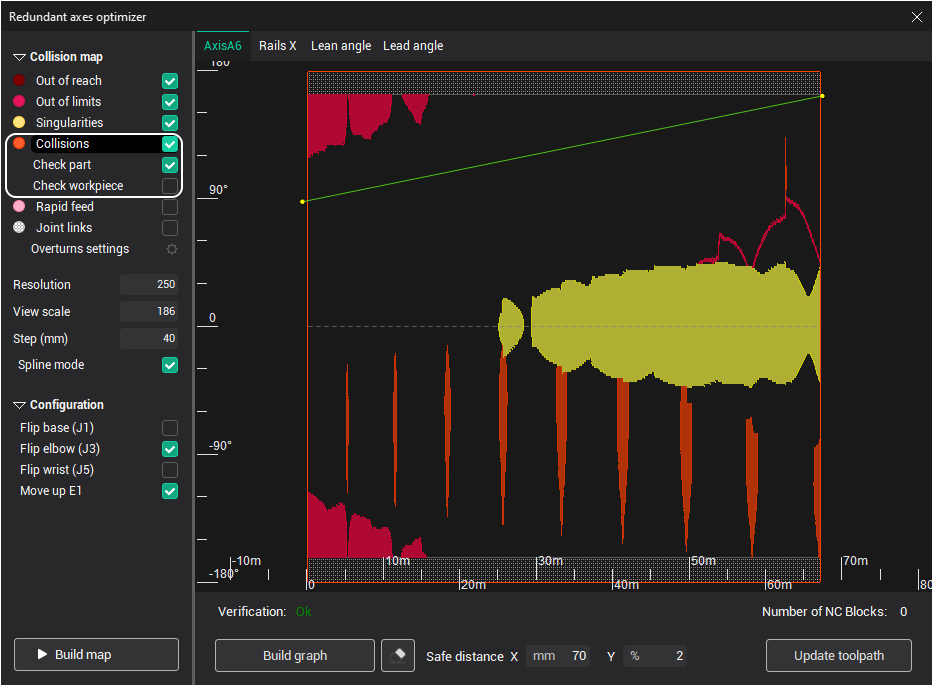
파트 감지 및 공작물
'충돌' 확인란 아래에는 부품 및/또는 공작물이 충돌 감지에 고려되는지 여부를 지정하는 2개의 확인란이 있습니다. 상위 '충돌' 체크박스가 'True'로 설정된 경우에만 활성화됩니다. . 절삭, 적층가공, 용접 등 가공형태에 따라 전환하여 사용하는 것이 좋습니다.
축 제어 스플라인
축 제어 법칙은 스플라인 곡선으로 정의됩니다. 그래서 스플라인이 없습니다. 이는 최적화된 축 값이 동일하게 유지되거나(수동 모드에서) 전체 도구 경로(수평 회색 점선)에 대해 자동으로 제어(자동 모드에서)됨을 의미합니다.
목표는 왼쪽에서 오른쪽으로 충돌 없는 흰색 영역을 통과하는 가능한 가장 멋진 곡선을 만드는 것입니다.
새 스플라인을 생성하려면 스플라인이 통과해야 하는 빈 공간의 점을 두 번 클릭합니다. 2점이면 충분합니다. 스플라인이 생성된 후 마우스로 스플라인 제어점을 드래그하거나, 제어점을 삭제하거나(점을 마우스 오른쪽 버튼으로 클릭), 새 점을 추가(마우스로 스플라인을 당겨)하여 모양을 변경할 수 있습니다.
모두 제거 버튼을 사용하여 스플라인을 지웁니다.
충돌 방지 스플라인을 자동으로 생성하려면 자동 생성 버튼을 사용하세요.
확인
이 영역에는 현재 도구 경로의 상태가 표시됩니다. 툴패스에 충돌이 없으면 녹색 확인이 표시되고, 충돌이 있으면 충돌 횟수가 빨간색으로 표시됩니다. 축 제어 스플라인을 변경할 때마다 상태가 업데이트됩니다.
동시에 그래픽 보기에서 실제 공구 경로 곡선의 충돌 영역도 해당 충돌 유형 색상의 두꺼운 선으로 표시됩니다.
축 맵의 빈 공간을 클릭하거나 마우스 왼쪽 버튼을 누른 채 마우스를 움직여 도구 경로의 해당 위치에 도구를 배치할 수 있습니다.
도구 경로 재생성
도구 경로에 축 제어 법칙을 적용하려면 도구 경로 재생성 버튼을 클릭하십시오.
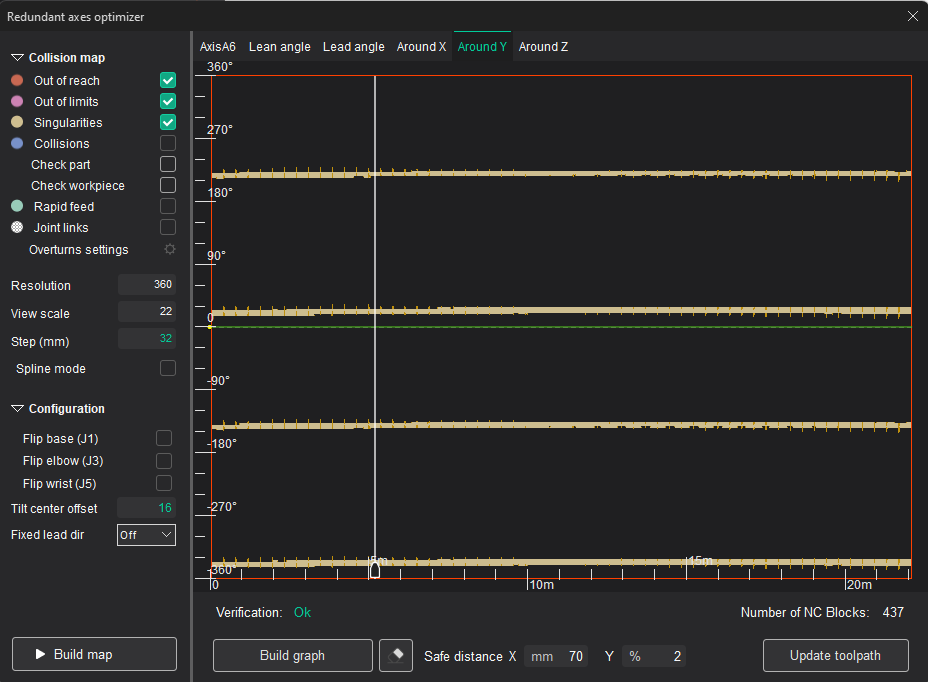
회전축은 탐지와 회피를 뒤집는다
중복 축 맵을 사용하여 회전 축으로 인해 발생하는 공구 경로의 잠재적인 문제를 확인할 수 있습니다. 전복하다. 회전축이 한계 중 하나에 도달하면 전복이 발생하며 가공을 계속하려면 전체 회전(360°)을 수행해야 합니다.°) 앞으로 또는 뒤로. 이전 버전에서는 범위 초과에도 불구하고 축이 항상 한계 내에 있기 때문에 사용자에게 전복에 대한 정보가 제공되지 않았습니다.
밝은 점선과 어두운 실선은 스플라인이 교차하는 경우 도구 경로에서 가능한 범위 초과 위치를 표시합니다. 뒤집힐 수 있는 회전축마다 선 색상이 다릅니다. 교차점이 항상 초과 초과와 일치하는 것은 아닙니다. 실제 초과 초과 위치는 스플라인에서 "최대 초과" 기호와 함께 굵은 빨간색 점으로 추가로 강조 표시됩니다. 또한 공구 경로에 전복이 있는 경우 "확인" 상태 표시줄에 해당 개수가 표시됩니다. 두 가지 유형의 전복이 있을 수 있습니다.
범위 초과는 축 다음에 발생합니다. 최소 도달했습니다( 파선 라인)
축 뒤에 최대 도달했습니다 (고체 라인)
"를 전환하세요.지도 범례 표시" 확인란을 선택하면 범위 초과 라인 색상/스타일 정보 및 기타 추가 지도 표기가 표시됩니다.
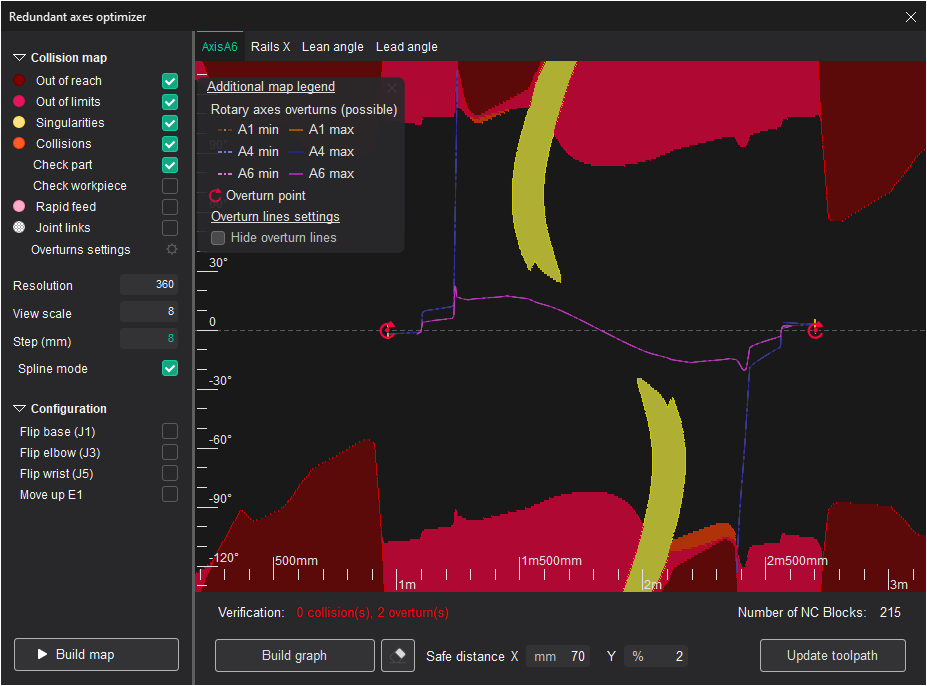
스크린샷 1. 도구 경로에는 2개의 전복이 포함되어 있습니다.
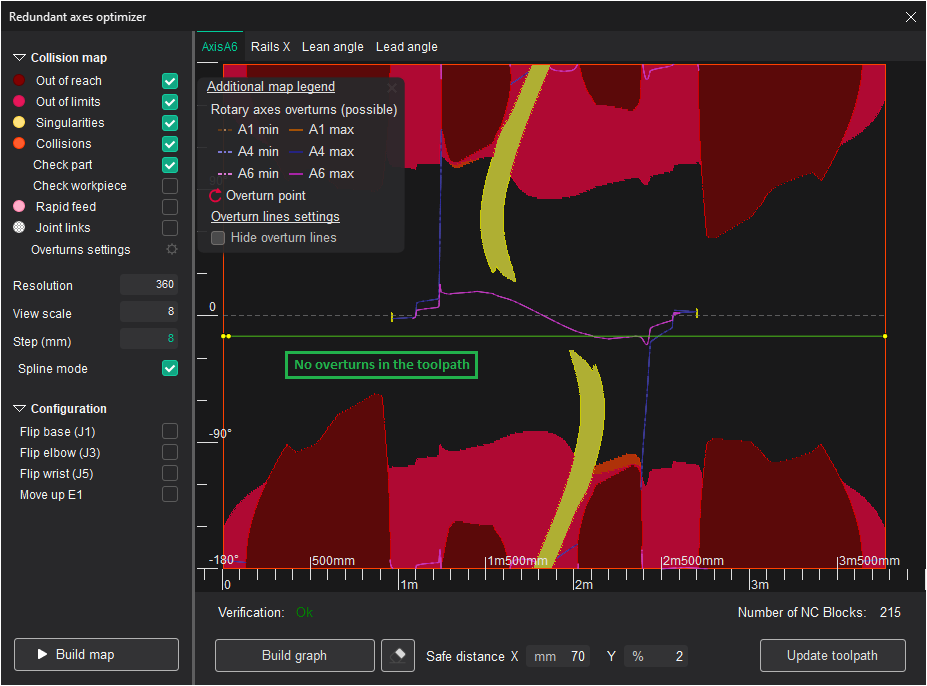
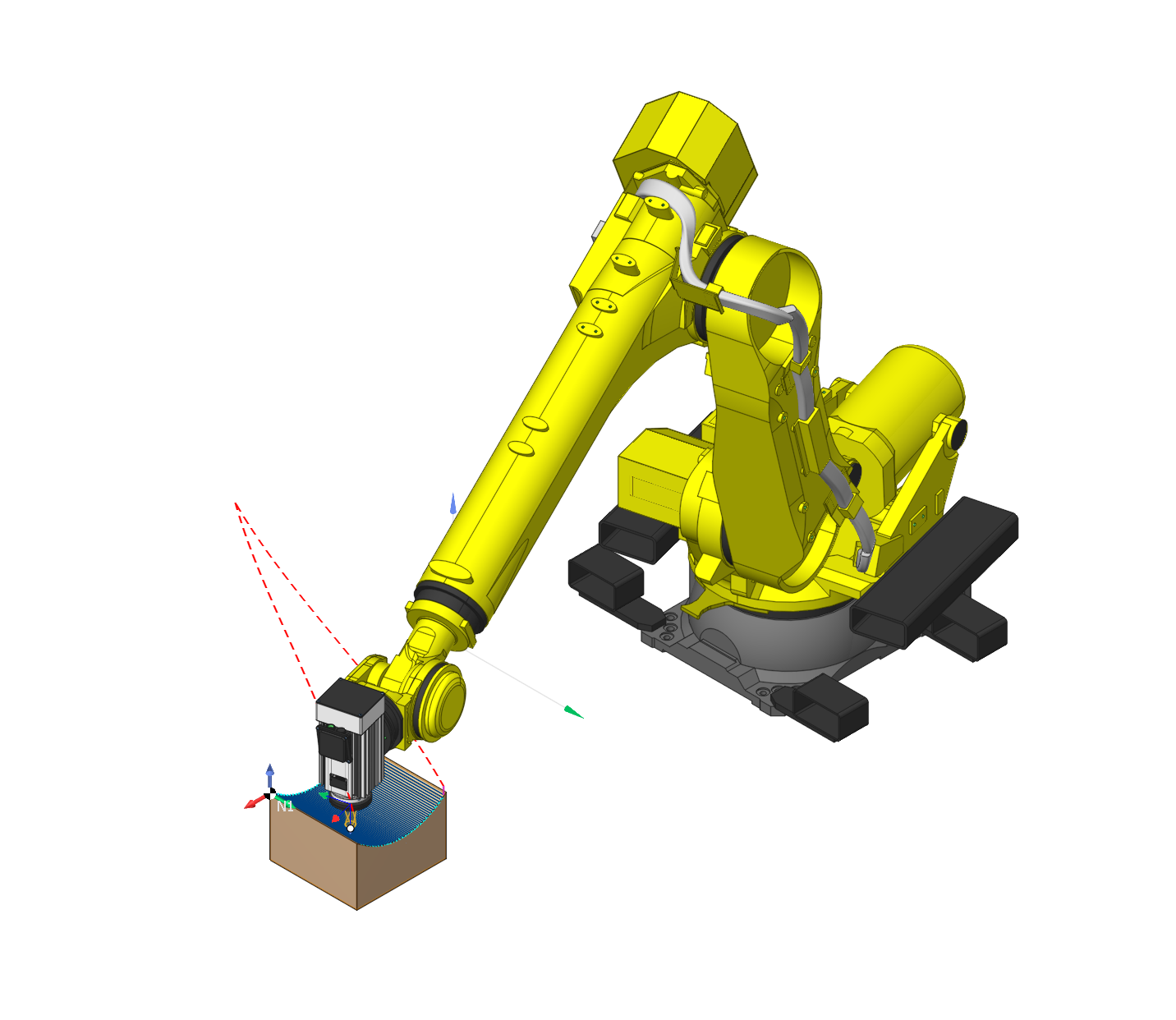
스크린샷 2. 스플라인이 아래쪽으로 이동되어 초과 초과 선과 교차하는 부분이 없습니다. 결과적으로 이제 도구 경로에 전복이 발생하지 않습니다.
작업의 도구 경로에 전복이 포함된 경우 다음을 시도할 수 있습니다. 피하다 스플라인을 이동하여 주어진 선과 교차하지 않거나 교차점이 "가짜"입니다(로터리 축 값이 이 지점에서 아직 한계에 도달했지만 그 값은 축 최소/최대 모듈로 360과 같습니다).°).
위 스크린샷에서 스플라인은 파란색/보라색 선과 교차하지 않는 직선으로 변경되어 도구 경로의 뒤집힘을 제거할 수 있습니다. 또한 로봇 구성("팔꿈치 뒤집기", "손목 뒤집기" 매개변수)을 변경하면 전복을 방지하는 데 도움이 될 수도 있습니다.
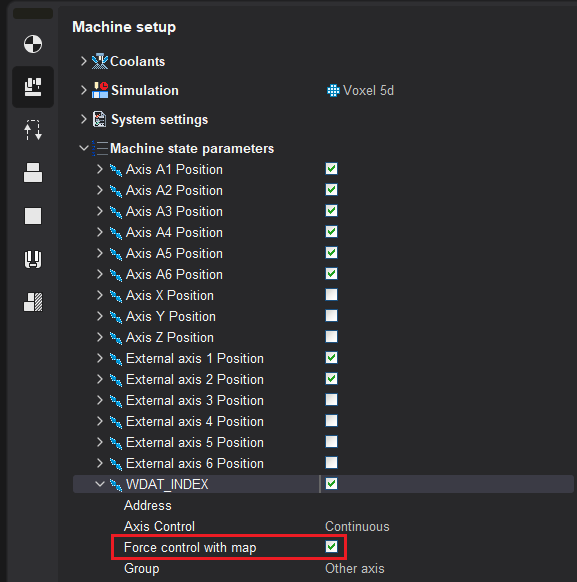
임의의 기계 매개변수 제어
임의 매개변수(기계 스키마에서 축으로 정의됨)의 변경 사항을 제어해야 하는 경우 "지도를 이용한 힘 제어해당 기계 상태 매개변수의 " 플래그입니다.
플래그는 "의 각 기계 상태 매개변수에 대해 사용할 수 있습니다.기계설정 → 기계상태 매개변수" 섹션을 참조하세요. 그러면 축이 축 맵 창에 나타나고 평소와 같이 스플라인을 사용하여 각 도구 경로 지점에 매개변수 값을 정의할 수 있습니다.
<에서 기계의 xml 파일에 직접 이 플래그를 설정할 수도 있습니다.기계상태파라미터>, 이는 주어진 축에 해당합니다.
<SC 유형 ID="WDATPOS" 캡션="WDAT_INDEX" 유형="TMachineStateParameter"> ... <ControlWithMap 기본값="사실"/>SC 유형>로봇의 2축 회전 테이블의 특이점 회피
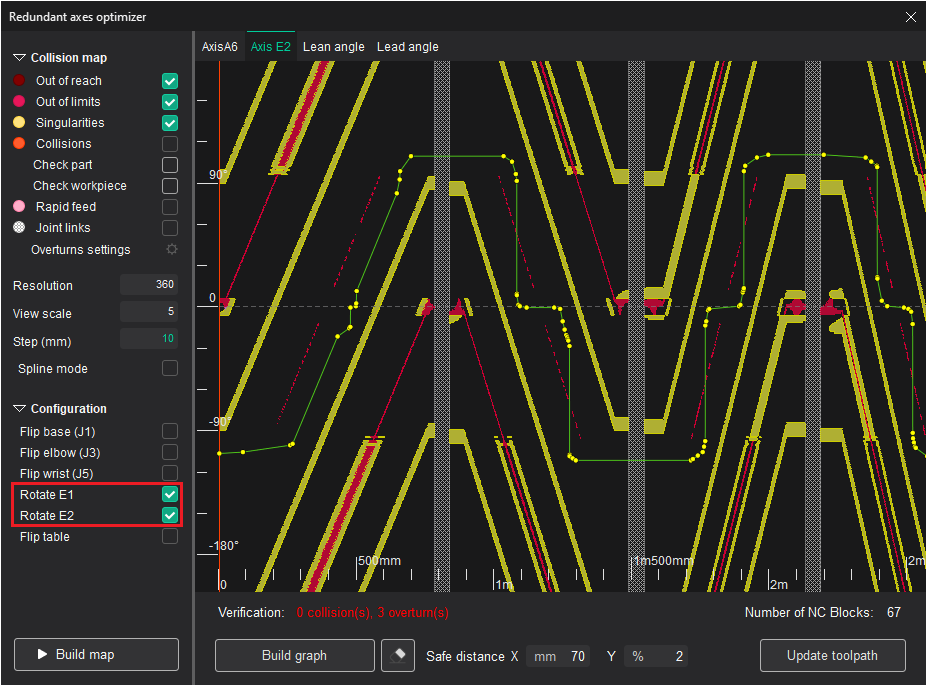
이전에는 로봇의 2축 회전 테이블과 회전 테이블 모두의 궤적을 정의해야 했다면 뒤집기 활성화되어 있습니다(일반적으로 "회전 E1" 그리고 "회전 E2"), 결과 궤적에는 특이점 영역이 포함되어 회전 테이블 상태가 매우 급격하게 변경될 수 있습니다. 이것이 바로 이 경우 축 맵에서 특수 모드가 활성화된 이유입니다. 5축 기계의 그래프 생성. 이 모드에서는 회전 테이블 축 중 하나에 대해서만 궤적을 정의해야 하며, 다른 축의 값은 작업에 의해 정의된 공구 법선과의 편차를 최소화하기 위해 자동으로 계산됩니다.
지도의 흰색 수직 구역은 특이점 구역에 해당합니다. 스플라인을 사용하면 급격한 변경 없이 E2 축 궤적을 정의할 수 있습니다.
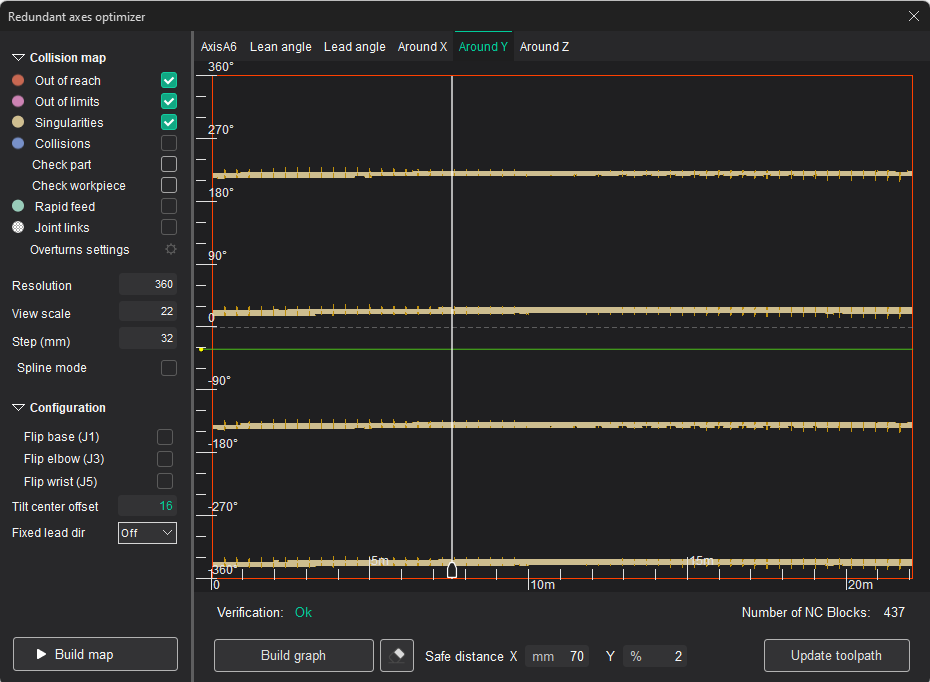
로봇 맵 기능의 LocalCS에 의한 회전 도구 경로입니다.
고정 좌표계를 기준으로 회전 맵을 구성할 수 있습니다.
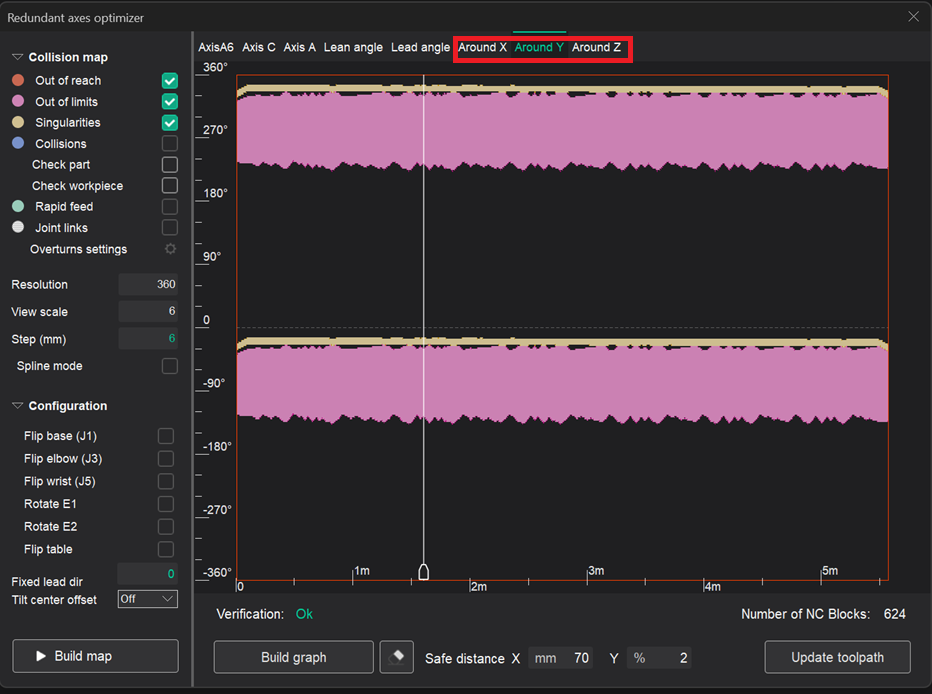
아래는 Y축 회전의 예입니다.
또한보십시오: