기계 축 제어 패널
기계 축 제어 창에서는 모든 공작 기계/로봇 좌표의 현재 값을 모니터링하고 수정할 수 있습니다. 이 창을 표시하려면 메인 툴바에서 해당 버튼을 클릭하십시오. 시뮬레이션 모드에서 공구경로를 분석하거나, 수동 접근을 구성하거나, 기술 작업 계산을 위한 초기 기계 위치를 결정할 때 유용합니다.기계 축 제어![]()
창은 시각적으로 여러 영역으로 나뉩니다. 패널의 수와 내용은 특정 공작 기계 구성에 따라 달라질 수 있습니다. 상단 또는 좌측의 툴바로 이러한 패널의 표시 여부를 제어합니다.
![]() 레이아웃 전환: 수직/수평:레이아웃 전환: 세로/가로: 패널 레이아웃을 세로 또는 가로로 전환합니다.
레이아웃 전환: 수직/수평:레이아웃 전환: 세로/가로: 패널 레이아웃을 세로 또는 가로로 전환합니다.
![]() 물리적 축 패널 가시성:물리 축 패널 표시: 물리적 기계 축 목록이 있는 패널을 표시하거나 숨깁니다.
물리적 축 패널 가시성:물리 축 패널 표시: 물리적 기계 축 목록이 있는 패널을 표시하거나 숨깁니다.
![]() 채널 패널 가시성:채널 패널 표시: 공작 기계의 제어 채널 정보가 있는 패널을 표시하거나 숨깁니다. 공작 기계의 채널 수에 따라 이러한 버튼이 여러 개 있을 수 있습니다. 아이콘 색상은 각 채널에 연결된 고유 색상을 나타냅니다. 해당 채널과 관련된 모든 정보는 이 색상으로 표시됩니다.
채널 패널 가시성:채널 패널 표시: 공작 기계의 제어 채널 정보가 있는 패널을 표시하거나 숨깁니다. 공작 기계의 채널 수에 따라 이러한 버튼이 여러 개 있을 수 있습니다. 아이콘 색상은 각 채널에 연결된 고유 색상을 나타냅니다. 해당 채널과 관련된 모든 정보는 이 색상으로 표시됩니다.
![]() 상태 패널 가시성:상태 패널 표시: 저장된 기계 상태 목록을 표시하는 패널을 표시하거나 숨깁니다.
상태 패널 가시성:상태 패널 표시: 저장된 기계 상태 목록을 표시하는 패널을 표시하거나 숨깁니다.
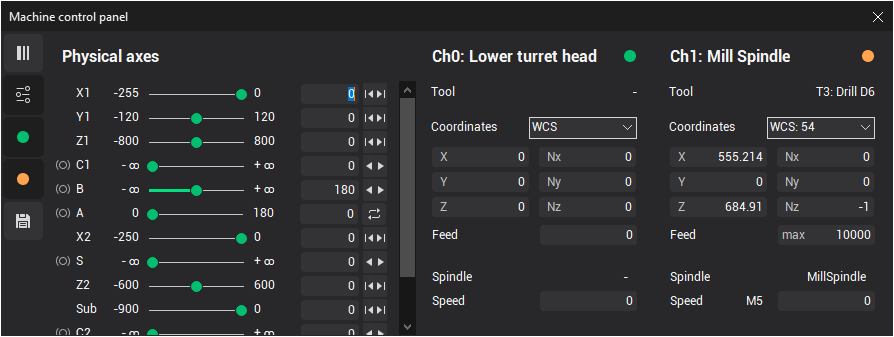
채널 패널에는 다음 값이 표시됩니다:채널 패널
채널의 색상, 인덱스 및 이름
채널의 활성 공구 번호 및 이름
활성 작업 좌표계 번호 콤보로, 공구 좌표를 표시할 추가 좌표계를 선택할 수 있습니다
지정된 공간 좌표계에서 벡터 또는 쿼터니언으로 표시되는 공구 좌표 및 방향 각도. 방향 각도의 유형은 기계 스키마 설정에 따라 달라질 수 있습니다.
현재 이송 속도 값 및 측정 단위 (이송 유형, 예: mm/최소, mm/rev 또는 급속 이송의 경우 "최대").
현재 스핀들 이름, 속도, 회전 방향 (M3, M4, M5) 및 회전 모드 (예: RPM의 경우 rev/최소 또는 CSS의 경우 m/최소)
물리 축 패널에는 각 기계 축에 대한 다음 정보가 표시됩니다:물리적 축 패널
축 이름
현재 작업 좌표계에 의존하지 않고 기계 스키마에서 축이 정의된 방식에 따른 축의 현재 물리 값. 축이 범위를 벗어나면 이 값이 빨간색으로 표시될 수 있습니다.
축의 최소 및 최대 한계값
축 브레이크 상태 (해당되는 경우):

브레이크 해제

브레이크 작동
축 속성에 기반한 축 값 빠른 수정 버튼:

축을 홈 위치로 복귀

축을 최소 한계값으로 이동

축을 최대 한계값으로 이동

회전 주기 축에서 한 주기 감소 (한계 범위 내)

회전 주기 축에서 한 주기 증가 (한계 범위 내)

동일한 공구-공작물 상대 위치를 여러 방법으로 달성할 수 있는 경우 기계 축을 대체 솔루션으로 전환
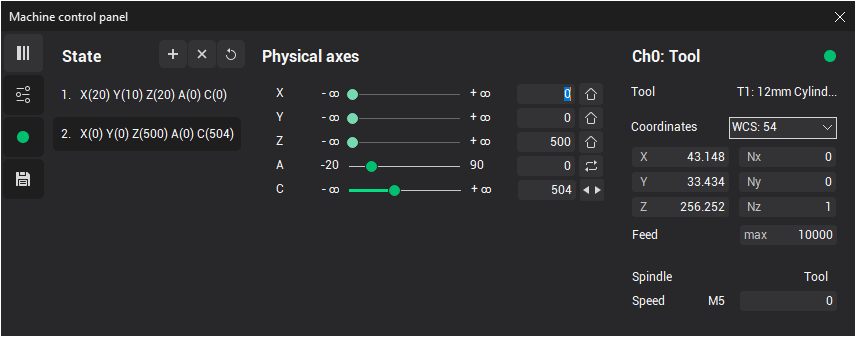
상태 패널에는 저장된 기계 상태가 표시되며 다음 버튼이 포함됩니다:

새 상태 추가: 현재 기계 상태를 목록에 저장합니다

선택한 상태 삭제: 선택한 상태를 목록에서 제거합니다

모든 상태 삭제: 저장된 상태 목록을 모두 지웁니다
목록에서 상태를 더블 클릭하면 기계를 해당 상태로 빠르게 전환할 수 있습니다. <Remember state> 기능은 6축 다관절 로봇과 같이 복잡한 축 구성을 가진 공작 기계에서 수동 전환을 구성할 때 유용합니다.수동 전환 구성
참고 항목: