공구 경로 편집
CLDATA 명령의 순서를 편집할 수 있습니다. 공구 경로를 재계산하면 모든 변경 사항이 초기화됩니다.
공구 경로에서 선택한 노드는 컨텍스트 메뉴 또는 표준 키를 사용하여 삭제, 복사 또는 클립보드로 잘라낼 수 있습니다:
[삭제] – 공구 경로 트리의 현재 노드를 삭제합니다.
[Ctrl+X] – 공구 경로 트리의 현재 노드를 클립보드로 잘라냅니다.
[Ctrl+C] – 공구 경로 트리의 현재 노드를 클립보드로 복사합니다.
[Ctrl+V] – 클립보드의 명령을 현재 노드 앞에 삽입합니다.
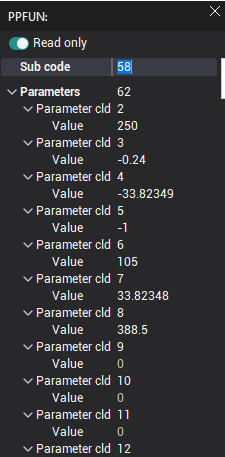
노드를 더블 클릭하거나 컨텍스트 메뉴에서 <편집>를 선택하면 선택한 CLDATA 명령의 파라미터를 편집할 수 있습니다. 열리는 대화 상자는 비모달 방식으로, 다른 노드를 편집하기 위해 대화 상자를 닫을 필요가 없습니다. 대화 상자의 제목은 편집 중인 노드의 유형입니다. 파라미터 목록은 노드 유형에 따라 달라집니다. 파라미터 편집을 시작하려면 읽기 전용 모드를 해제해야 합니다.
접근/복귀 편집
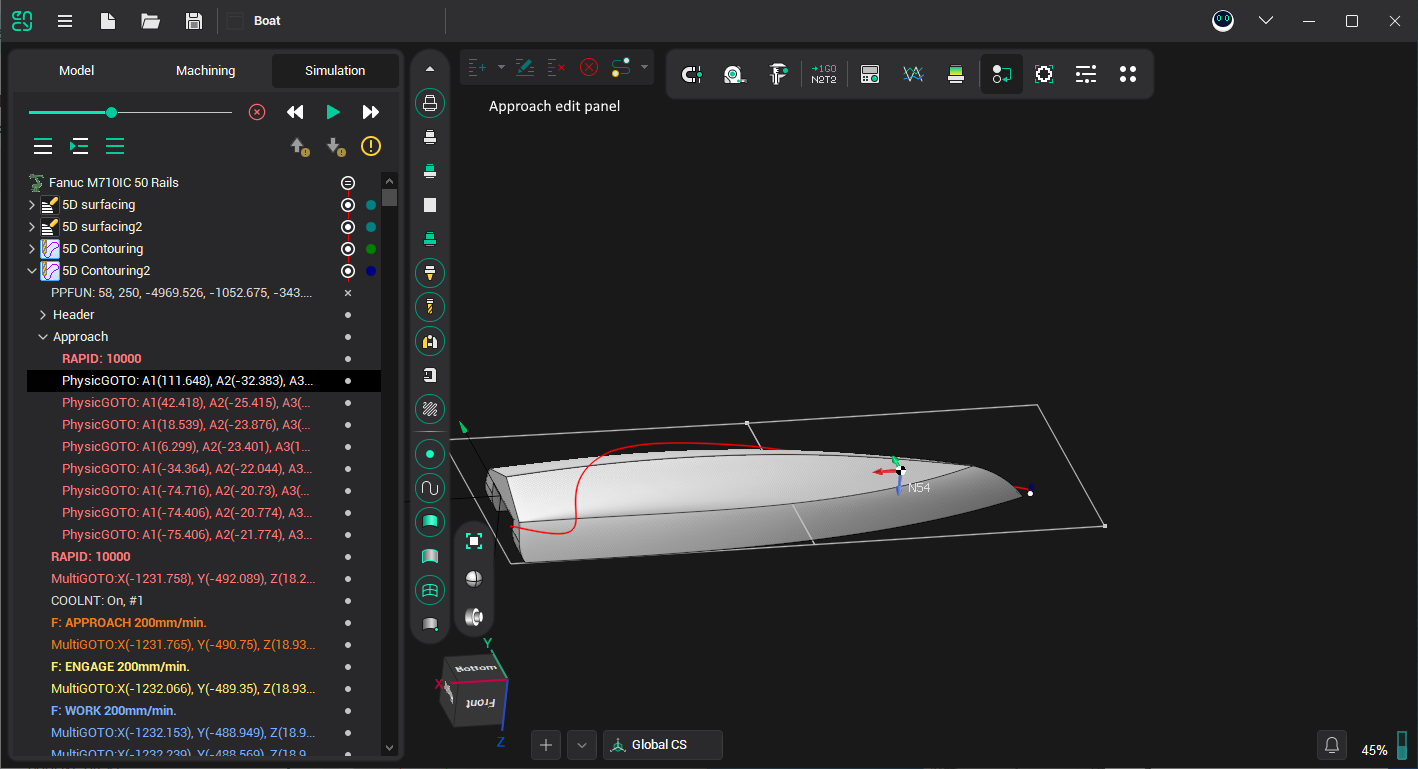
사용자가 공구 경로 트리에서 '접근' 또는 '복귀' 섹션을 선택하면 추가 패널이 표시됩니다(스크린샷 참조). 이 패널에서는 접근 또는 복귀 섹션을 보다 편리하게 편집할 수 있는 다음 버튼들을 사용할 수 있습니다(왼쪽에서 오른쪽 순서):

현재 상태 삽입 – 이 명령은 현재 공작 기계 상태를 공구 경로 트리의 노드로 삽입합니다. 상태는 트리에서 현재 선택된 노드 앞에 삽입됩니다.
드롭다운 메뉴를 사용하여 삽입할 노드의 유형(PhysicGOTO 또는 MultiGOTO)을 변경할 수 있습니다.
현재 상태 편집 – 이 버튼을 누르면 공구 경로 트리에서 현재 선택된 상태를 대화형으로 편집할 수 있습니다. 선택한 노드의 좌표가 현재 공작 기계 상태와 동기화됩니다. 대화형 편집을 종료하려면 이 버튼을 다시 누르십시오.
현재 상태 삭제 – 공구 경로 트리의 현재 노드를 삭제합니다.
접근/복귀 초기화 – 접근 또는 복귀 섹션 내의 모든 명령을 삭제합니다. 단, 마지막 명령(접근/복귀의 종료 상태에 해당)은 유지됩니다.
모션 플래너로 계산 - 공작 기계 노드 간의 충돌을 배제하는 모션 플래닝 알고리즘 중 하나를 사용하여 접근 또는 복귀 궤적을 자동으로 생성합니다. 경로 계산 시간 제한 등 모션 플래너의 여러 파라미터를 드롭다운 메뉴에서 지정할 수 있습니다.
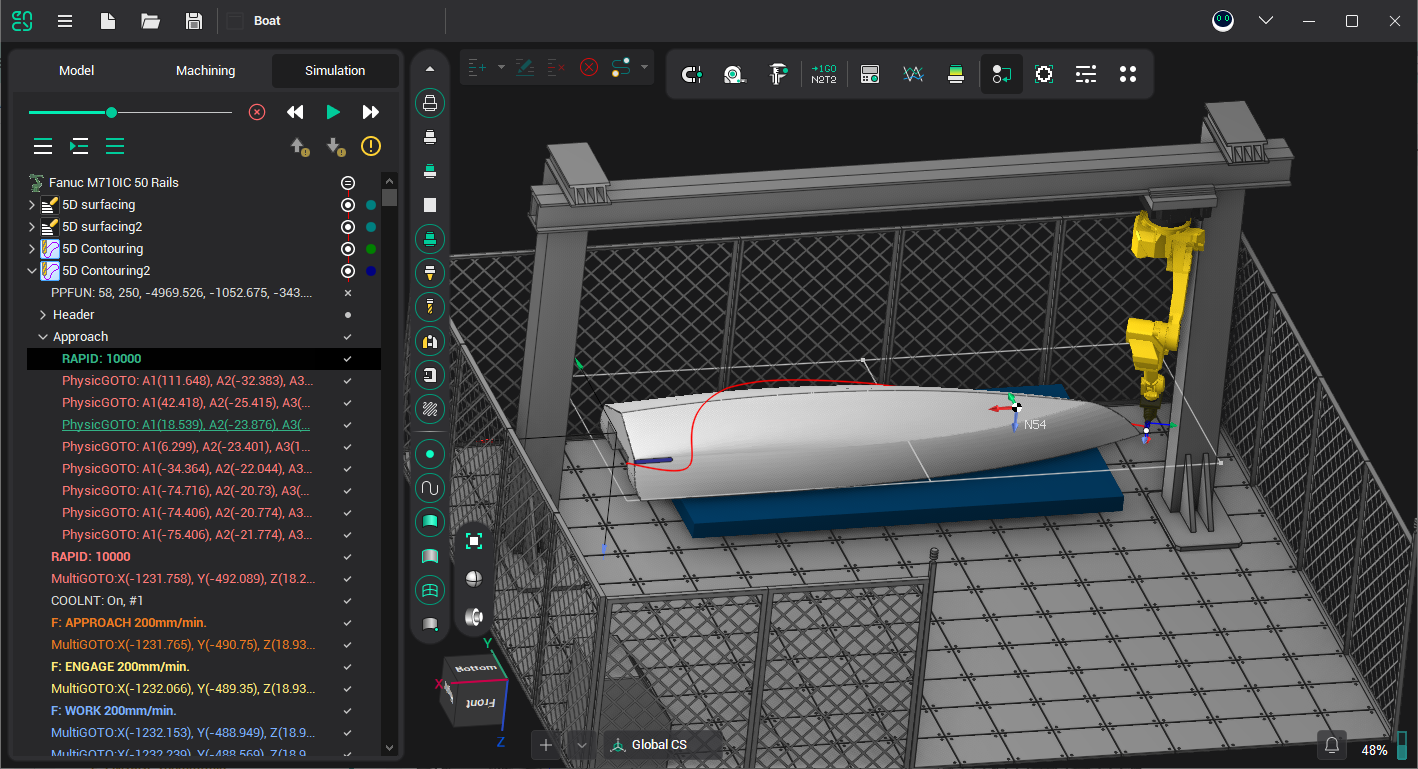
이 스크린샷에서는 모션 플래너를 사용하여 전체 접근 궤적이 자동으로 생성되었습니다. 생성된 궤적이 만족스럽지 않은 경우 대화형 편집을 사용하여 접근/복귀 경로를 수정할 수 있습니다.