접근 및 복귀 규칙
접근 및 복귀 규칙은 첫 번째/마지막 가공 점까지의 추가 공구 접근/복귀 경로를 정의합니다. 공구 교환 위치와 함께 사용하면, 접근 규칙은 공구 교환 위치에서 첫 번째 가공 점까지의 공구 경로를 결정하고, 복귀 규칙은 마지막 가공 점에서 공구 교환 위치까지의 공구 경로를 결정합니다.
작업의 접근/복귀 규칙 정의
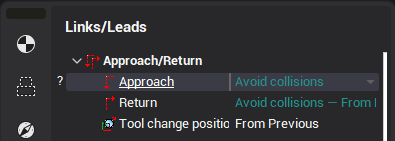
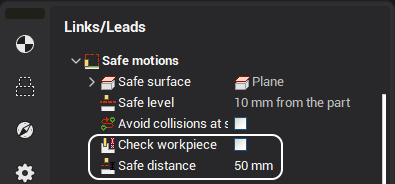
접근/복귀 규칙은 작업의 링크/리드 인스펙터 패널에서 접근/복귀 섹션에 지정됩니다. 체크박스는 충돌 방지를 위해 접근/복귀가 자동으로 생성되는지 여부를 나타냅니다. 충돌 방지 - 공작 기계 충돌을 방지하면서 특수 알고리즘으로 접근/복귀 궤적을 자동 생성합니다. 이 접근/복귀 유형을 선택하려면 체크박스를 비활성화하십시오. 이 유형을 선택한 경우 접근/복귀에 대해 "안전 거리" 및 "공작물 검사" 파라미터를 추가로 정의할 수 있습니다.링크/리드충돌 방지
충돌 회피 충돌 방지 - 공작 기계 충돌을 방지하면서 특수 알고리즘으로 접근/복귀 궤적을 자동 생성합니다. 이 접근/복귀 유형을 선택하려면 체크박스를 비활성화하십시오. 이 유형을 선택한 경우 접근/복귀에 대해 "안전 거리" 및 "공작물 검사" 파라미터를 추가로 정의할 수 있습니다.안전 거리공작물 감지
접근/복귀 체크박스가 활성화되어 있으면 규칙이 명시적으로 정의되었거나 아래에 나열된 특수 유형 중 하나임을 의미합니다. 편집 필드에는 접근/복귀(숨겨진) 유형에 따라 계산된 실제 규칙이 표시됩니다. 작업에서 사용하는 접근/복귀를 조정하려면 명령을 직접 편집하면 됩니다.활성화됨
접근/복귀 정의 유형
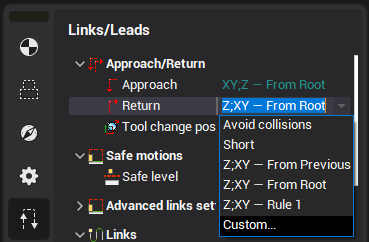
접근/복귀는 다음 정의 유형 중 하나를 가질 수 있습니다. 이 유형은 숨겨져 있으며 접근/복귀 규칙 편집 양식에서만 표시됩니다.접근/복귀 규칙 편집 양식
기본 규칙 - 새로 생성된 작업의 접근/복귀는 이 유형을 갖습니다. 규칙을 기본값으로 재설정하려면 편집 필드를 지우고 <Enter>를 누르십시오. 기본 유형의 실제 규칙 계산 시 고려되는 요소는 다음과 같습니다(우선순위 내림차순):
작업의 공작물 홀더/공구 홀더 쌍에 대해 서브머신이 정의된 경우 서브머신의 접근/복귀를 사용합니다. 서브머신에 대한 자세한 내용은 기계 스키마의 서브머신 정의를 참조하십시오.공작 기계 스키마의 서브머신 정의
작업이 이전 작업과 동일한 공작물 홀더 및 공구 커넥터를 사용하는 경우 이전 작업의 접근/복귀를 사용합니다.이전 작업에서
그 외의 경우 작업의 셋업 스테이지 규칙 또는 셋업 스테이지가 없거나 작업 자체가 셋업 스테이지인 경우 작업 트리(기계)의 첫 번째 작업에 정의된 규칙을 사용합니다.셋업 스테이지
2. 이전 작업의 규칙. 이전 작업의 규칙.
3. 루트 작업의 규칙 - 작업 트리 루트의 '기술' 탭에 지정된 규칙을 사용합니다(이전 레거시 CAM 시스템처럼 기계에 정의된 단일 규칙이 아님).루트 작업의 규칙
4. 사용자 정의 - 명령 목록으로 규칙이 명시적으로 정의됩니다.사용자 정의
5. 단축 - 공구경로에 추가 점이 삽입되지 않습니다. 공구가 공구 교환 위치에서 가공 공구경로의 첫 번째 점까지 최단 거리로 직접 이동합니다. 기계가 로봇인 경우 물리 축(PhysicGOTO)을 사용하여 이동합니다. 최단 거리
6. 기계 접근/복귀 목록의 규칙 - 작업은 기계의 접근/복귀 목록에 있는 항목 중 하나를 참조할 수 있습니다. 의미 있는 이름으로 여러 접근/복귀를 기계에 지정할 수 있습니다. 먼저 규칙 이름이 표시되고, 괄호 안에 규칙의 명령 시퀀스가 표시됩니다. 목록에 대한 자세한 내용은 별도 문서에서 확인할 수 있습니다.접근/복귀 목록
접근/복귀 규칙 구문
"사용자 정의" 접근/복귀 규칙은 공구경로의 "접근" 또는 "복귀" 섹션에서 출력되는 CL 데이터를 명시적으로 정의합니다. 하나의 접근 또는 복귀 규칙은 세미콜론으로 구분되는 여러 명령으로 구성됩니다. 명령은 키워드로 정의되며, 뒤에 기계 축 이름과 값(좌표) 목록이 올 수 있습니다.사용자 정의CLData명령명령키워드
<Axes value list>는 공백으로 구분된 기계 축 ID(또는 주소) 목록으로 정의되며, 해당 명령에 대응하는 상태에서 기계 축의 정확한 위치를 선택적으로 지정할 수 있습니다. 축 값은 괄호 안에 또는 축 ID 바로 뒤에 지정할 수 있습니다. 축 값 정의 예시: X100 Y(200) Z A1 A2(253.2) A3(100.4) A4 A5 A6축 값 목록명령
X100 Y(200) Z
A1 A2(253.2) A3(100.4) A4 A5 A6
지원되는 명령 유형(키워드)은 다음과 같습니다: <MultiGOTO>(또는 명령 없음) + <Axes value list> - 다축 좌표 이동을 정의합니다("Multigoto" CL 데이터 노드). <PhysicGOTO>(또는 <G53>) + <Axes value list> - 물리 축 좌표에서의 이동을 정의합니다("Physicgoto" CL 데이터 노드). <GOTO> + <Axes value list>("X", "Y" 또는 "Z"여야 함) - 단순 직선 이동을 정의합니다("Goto" CL 데이터 노드). <GOHOME> + <Axes value list> - "공구 교환" 위치로의 이동입니다("GOHOME" CL 데이터 노드). 복귀 규칙에서만 사용됩니다. <LCS> - 다목적 명령입니다. 기본 로직은 접근의 특정 위치에서 가공 모드를 활성화하고, 복귀에서 동일한 명령으로 비활성화하는 것입니다. 출력되는 CL 데이터는 작업 파라미터에 따라 달라집니다: 작업의 로컬 좌표계가 활성화된 경우 접근에서 LCS 활성화 명령("원점 LCS: On")이 출력되고, 복귀에서 LCS 비활성화(원점 LCS: 끄기)가 출력됩니다. "공구 중심점 관리"가 활성화된 경우 접근에서 TCPM 모드 활성화 명령("Interp 5axis: On")이 출력되고, 복귀에서 TCPM 비활성화(Interp 5axis: 끄기)가 출력됩니다. 참고: "TCPM" 모드는 로컬 좌표계와 동시에 사용할 수 없습니다. 극좌표 보간 활성화/비활성화. U축 선삭 모드 활성화/비활성화. <SLCS(...)> - 접근 또는 복귀 내에서 "로컬 좌표계"를 임시로 활성화하는 데 사용됩니다. 이 기능에 대한 자세한 내용은 아래의 "TCPM이 활성화된 작업의 접근" 섹션을 참조하십시오.명령 유형
<MultiGOTO>(또는 명령 없음) + <Axes value list> - 다축 좌표 이동을 정의합니다("Multigoto" CL 데이터 노드).MultiGOTO축 값 목록Multigoto
<PhysicGOTO>(또는 <G53>) + <Axes value list> - 물리 축 좌표에서의 이동을 정의합니다("Physicgoto" CL 데이터 노드).PhysicGOTOG53축 값 목록Physicgoto
<GOTO> + <Axes value list>("X", "Y" 또는 "Z"여야 함) - 단순 직선 이동을 정의합니다("Goto" CL 데이터 노드).GOTO축 값 목록Goto
<GOHOME> + <Axes value list> - "공구 교환" 위치로의 이동입니다("GOHOME" CL 데이터 노드). 복귀 규칙에서만 사용됩니다.GOHOME축 값 목록GOHOME
<LCS> - 다목적 명령입니다. 기본 로직은 접근의 특정 위치에서 가공 모드를 활성화하고, 복귀에서 동일한 명령으로 비활성화하는 것입니다. 출력되는 CL 데이터는 작업 파라미터에 따라 달라집니다:LCS
작업의 로컬 좌표계가 활성화된 경우 접근에서 LCS 활성화 명령("원점 LCS: On")이 출력되고, 복귀에서 LCS 비활성화(원점 LCS: 끄기)가 출력됩니다.작업 로컬 좌표계원점 LCS: On원점 LCS: 끄기
"공구 중심점 관리"가 활성화된 경우 접근에서 TCPM 모드 활성화 명령("Interp 5axis: On")이 출력되고, 복귀에서 TCPM 비활성화(Interp 5axis: 끄기)가 출력됩니다.Interp 5axis: OnInterp 5axis: 끄기
참고: "TCPM" 모드는 로컬 좌표계와 동시에 사용할 수 없습니다.
<SLCS(...)> - 접근 또는 복귀 내에서 "로컬 좌표계"를 임시로 활성화하는 데 사용됩니다. 이 기능에 대한 자세한 내용은 아래의 "TCPM이 활성화된 작업의 접근" 섹션을 참조하십시오.SLCS()임시
로컬 좌표계를 사용한 TCPM 활성화 작업의 접근/복귀
"공구 중심점 관리" 모드는 5축 가공에서 일반적으로 사용되지만, 기계 운동학 및 공작물 장착이 실제 기계 운동학 및 파트 장착과 완전히 일치하지 않을 경우 문제가 발생할 수 있습니다. 이 경우 충돌이 발생할 가능성이 높습니다. 해결 방법은 접근에서 "TCPM" 모드가 활성화되기 전에 SLCS(...) 블록 내의 특정 "로컬 좌표계"에서 일부 기계 이동을 수행하는 것입니다. <SLCS()> 명령을 사용하면 "TCPM" 모드가 접근의 끝에서 활성화되고, 해당 명령 시퀀스가 복귀 규칙에 있는 경우 복귀의 시작에서 비활성화됩니다.SLCS()이전 SLCS()끝
이 명령에서 사용하는 LCS는 작업의 파라미터로 정의되지 않으며, <SLCS> 명령이 접근 섹션에 있는 경우 공구경로의 첫 번째 점에, 복귀 섹션에 있는 경우 공구경로의 마지막 점에 대응합니다. 회전 축 이동은 이 LCS를 활성화하기 전에 수행해야 합니다.첫 번째 점SLCS접근 섹션마지막 점 복귀 섹션회전축이전
괄호 안에 하나 이상의 이동 명령을 지정할 수 있습니다(예: SLCS(G53 X100; YZ)). 이러한 이동은 해당 로컬 좌표계에서 수행됩니다. <SLCS()>를 사용한 전체 접근 규칙 예시: G53 Z(-0.5); G53 X(0.5) Y(-0.5); AC; XY; SLCS(XYZ)SLCS()
G53 Z(-0.5); G53 X(0.5) Y(-0.5); AC; XY; SLСS(XYZ)고급 접근/복귀 규칙 편집
편집 필드를 사용하면 작업의 접근/복귀를 빠르게 조정할 수 있습니다. 예를 들어, 작업의 접근을 이전 작업과 연결하거나 긴 명령 시퀀스를 지정해야 하는 경우 접근/복귀 편집 양식을 사용하십시오. 편집 필드의 말줄임표 버튼을 사용하여 양식을 열 수 있습니다. 이 양식에서는 기계 접근/복귀 목록도 편집할 수 있습니다.접근/복귀 편집 양식
참고: