포인트 픽 앤 플레이스
이는 다음을 기반으로 합니다. 선택 및 장소 운영.
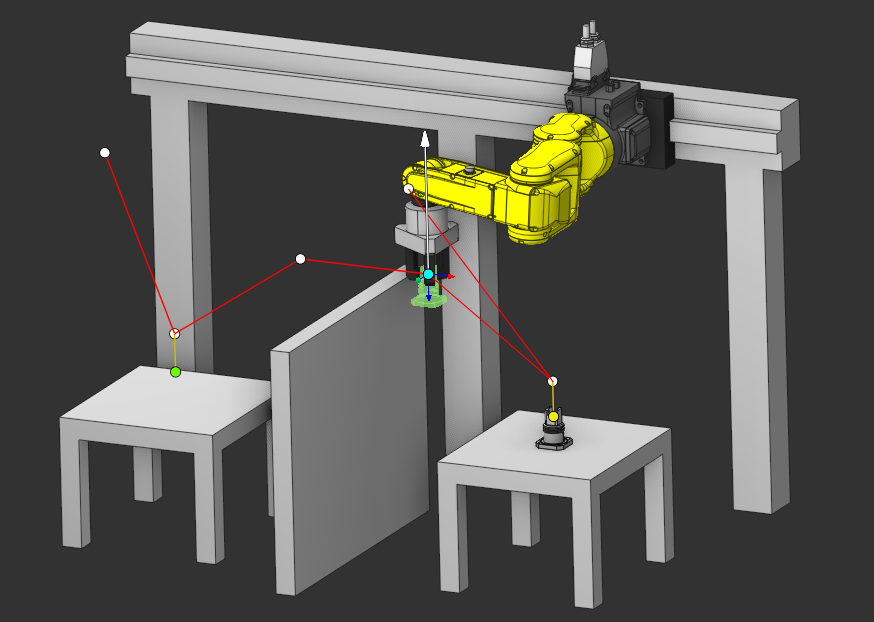
는 직무 할당 ![]() 노드 포인트를 기반으로 만들어졌습니다. 지점에서는 기계를 이동하기 위한 위치가 설정됩니다. 포인트를 추가하고 제거하여 원하는 파트의 움직임을 설정할 수 있습니다.
노드 포인트를 기반으로 만들어졌습니다. 지점에서는 기계를 이동하기 위한 위치가 설정됩니다. 포인트를 추가하고 제거하여 원하는 파트의 움직임을 설정할 수 있습니다.
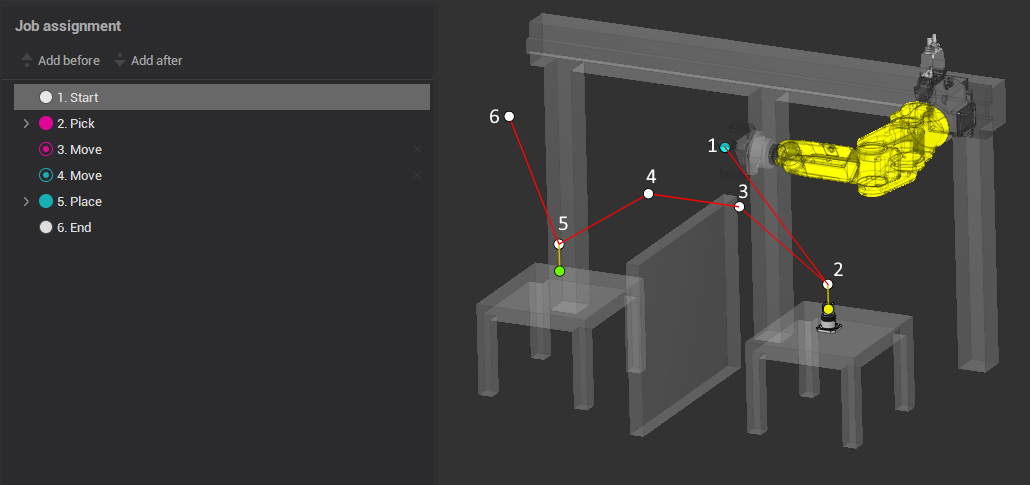
A 직무 할당 여러 유형의 포인트로 구성됩니다.
 시작점
시작점 선택 포인트
선택 포인트 이동점(선택점 기준)
이동점(선택점 기준) 이동점(위치점 기준)
이동점(위치점 기준) 포인트 배치
포인트 배치- 끝점
이러한 점은 일련의 궤적을 구성하는 데 사용될 수 있습니다.
- 시작점
읽기 전용입니다. 여기가 끝점입니다. 이전 작업의 - 선택 포인트
부품의 그립 위치입니다.
속성: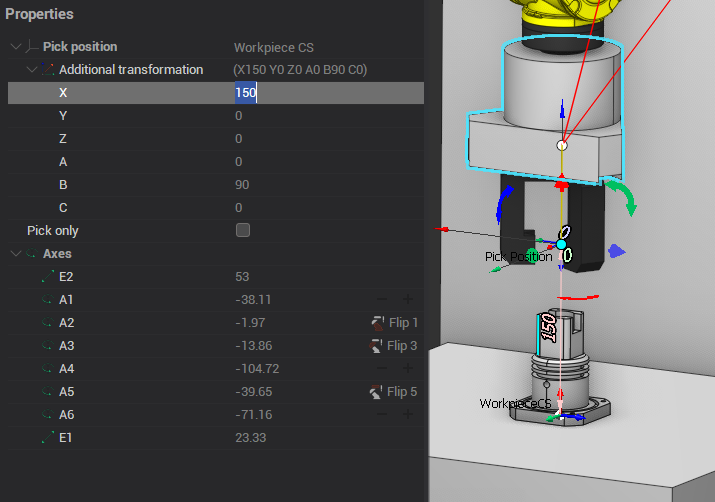
선택 위치는 기하학 좌표계에서 정의됩니다. 추가 변형.
if 선택만 가능 를 선택하면 이 지점에서 궤적이 멈춥니다. 축 - 현재 지점의 기계 축.
축 - 현재 지점의 기계 축.축을 변경하면 두 개의 버튼이 나타납니다.
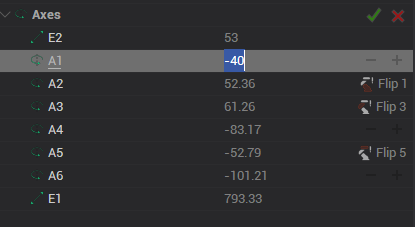
 - 포인트를 기계 끝으로 이동합니다.
- 포인트를 기계 끝으로 이동합니다. - 이전 값을 반환합니다.
- 이전 값을 반환합니다.
 - 360/+360
- 360/+360 뒤집기 - 로봇의 뒤집기를 제어합니다.
뒤집기 - 로봇의 뒤집기를 제어합니다. - 이동점(선택점 기준)
페이지에는 중간 포인트를 추가하기 위한 "이전 위치 추가" 및 "이후 위치 추가" 버튼이 있습니다.
부품의 초기 위치를 변경하면 기본적으로 이 지점도 이동합니다.
속성: vX 수정 - 6축 편집 모드 활성화:
vX 수정 - 6축 편집 모드 활성화: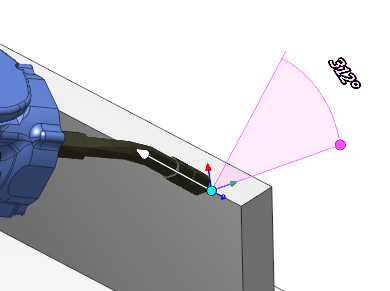
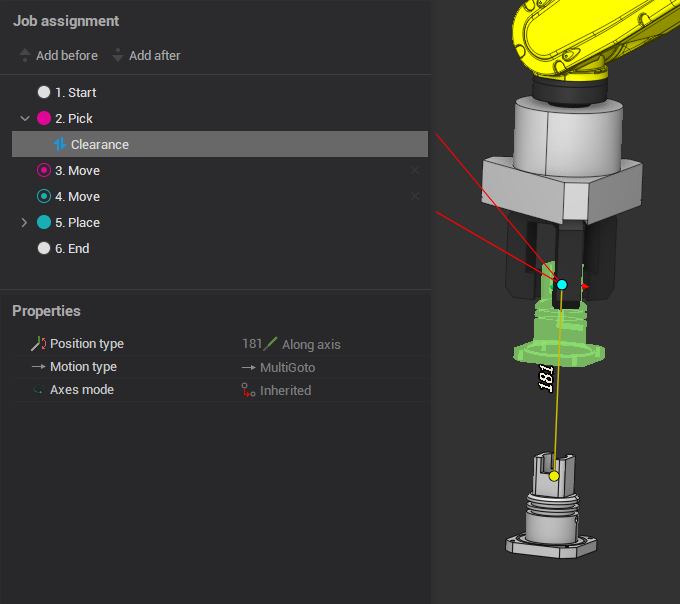
 동작 유형 - 해당 지점으로 이동할 유형에 따라 설정됩니다.
동작 유형 - 해당 지점으로 이동할 유형에 따라 설정됩니다.MultiGoto - 다중 좌표 이동

PhysicGoto - 물리적 기계 축 이동

충돌 방지 - 충돌 방지 동작
- 이동점(위치점 기준)
파트의 끝 위치를 따라 포인트가 이동한다는 점에서 이전 포인트와 다릅니다. - 포인트 배치
위치 부품이 배치되어야 하는 위치.
부품이 배치될 위치는 다음에 의해 정의됩니다. 공작물 커넥터 그리고 공작물 설정. 그리퍼의 모든 움직임은 정의된 범위에서 생성됩니다. 공작물 좌표계.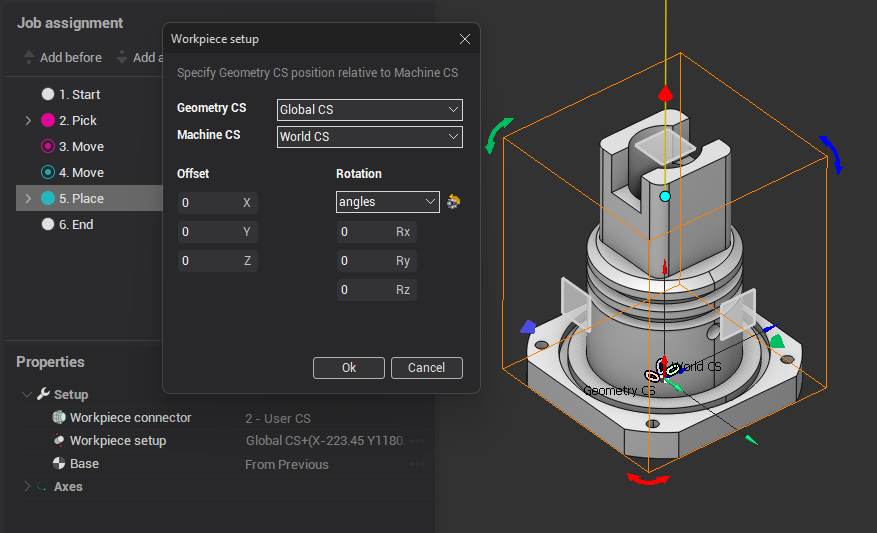
- 끝점
이는 공구 교환 지점으로의 복귀입니다. 꺼져 있으면 궤적이 배치 점에서 끝납니다.
포인트 정리
이러한 점을 사용하여 픽 및/또는 배치 위치에 대한 결합/후퇴 이동의 길이와 방향을 정의할 수 있습니다.
대화형에서 포인트를 드래그하는 방법은 다음에서 검색 결과를 얻을 수 있습니다. 점접합작업
또한보십시오: