픽 앤 플레이스
공구 경로 및 매개변수
"선택과 장소" 작업은 그리퍼 도구를 제어하여 공작물을 기계의 작업 영역 내부로 이동하도록 설계되었습니다.
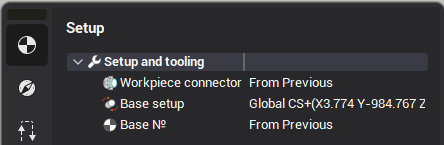
공작물은 이전 작업에서 정의된 위치에서 다음에 의해 정의된 새 위치로 이동됩니다. 공작물 커넥터 그리고 공작물 설정. 그리퍼의 모든 움직임은 정의된 범위에서 생성됩니다. 공작물 좌표계.
픽 앤 플레이스 작업 경로에는 픽, 플레이스, 리턴의 3가지 주요 섹션이 있습니다.
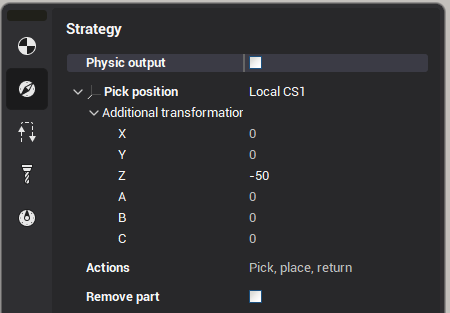
선택 섹션 도구의 초기 위치(일반적으로 도구 변경 지점)에서 부품의 선택 위치까지 그리퍼의 이동이 포함됩니다. 위치는 추가 오프셋을 사용하여 형상 좌표계에서 정의됩니다.
장소 섹션 공작물과 함께 초기 위치에서 새 위치까지 그리퍼의 움직임이 있습니다. 안전한 표면을 통해 또는 활성화된 충돌 방지 옵션을 통해 실행할 수 있습니다.
복귀 섹션 배치 위치에서 최종 위치(보통 공구 교환 지점)까지 빈 그리퍼의 이동입니다.
작업 매개변수는 생성되어야 하는 섹션을 정의합니다. 옵션인 경우 부품을 제거하다 활성화되면 공작물은 배치 후 사라집니다.
시작/후퇴 추가 중
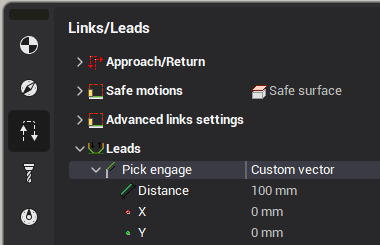
이러한 매개변수를 사용하여 선택 및/또는 배치 위치에 대한 결합/후퇴 이동의 길이와 방향을 정의할 수 있습니다. "선택 참여"를 생각해 봅시다. 이 매개변수는 부품을 선택하기 위해 도구 결합(특수 "결합" 피드 사용)이 이루어지는 위치를 정의합니다. 참여에는 세 가지 유형이 있습니다.
없음 - 시작이 비활성화되었습니다.
자동 - 시작은 공구 축을 따라 수행됩니다.
사용자 정의 벡터 - 사용자 정의 방향에 따라 시작이 수행됩니다.
"거리" 매개변수는 선택한 방향을 따라 공구 이동 길이를 정의합니다(이동은 맞물림 피드를 사용하여 수행됨).
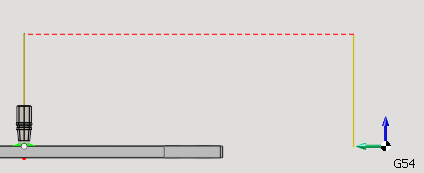
위의 스크린샷에는 수직 세그먼트가 맞물림/후퇴에 해당하는 선택 및 배치 궤적의 예가 있습니다(이 예에서는 길이가 동일합니다). 빨간색은 급속 이송을 나타내고, 올리브색은 이송/후퇴를 나타냅니다.
"다음 단계로 배치" 작업
이것은 "회전 인계"와 마찬가지로 부품을 배치하기 위한 위치를 가져오는 특별한 종류의 픽 앤 플레이스 작업입니다. 다음 작업(보통은 설정 단계 or 파트 그룹). 나머지 매개변수는 일반적인 픽 앤 플레이스 작업과 동일합니다.
이 작업의 주요 용도는 로봇 및 밀링 머신입니다. 터닝 또는 밀턴 가공의 경우 전문 ""을 사용하는 것이 좋습니다.회전 인수하다" 대신 작업을 수행합니다.
선택 만들기 및 프로젝트 배치 튜토리얼
아래 비디오는 조립 프로젝트를 만드는 방법을 보여줍니다. 더보기
예시 프로젝트
다음 샘플 프로젝트에는 선택 및 장소의 다양한 예가 포함되어 있습니다.밀링/WoodWorking/FrameAssembly.stcp" 그리고 프로젝트 "에서로봇/선택 및 장소" 폴더.
또한보십시오: