클램프 장치 제어
이동 부품 작업에서는 부품을 초기 위치에서 최종 위치로 이동하는 데 사용되는 장치에 대한 제어가 필요한 경우가 많습니다. 예를 들어 부품을 집기 전에 턱을 밀어내고 부품을 고정한 후에 조를 닫는 것입니다. 이 클램프 기능을 사용하면 한 공작물 홀더에서 다른 공작물 홀더로 클램프 장치를 전송하는 과정에서 클램프 장치의 상태를 변경하기 위한 CLData 명령을 자동으로 삽입할 수 있습니다.

추가 CLData 명령
추가 특수 CLData 명령은 클램프 장치 상태의 변경을 나타내는 데 사용됩니다. 이 명령은 프로젝트 시뮬레이션 중에 고려되며 특수 "M" 명령으로 포스트 프로세서에 출력되기도 합니다. <클램프> CLData 명령의 형식은 다음과 같습니다.
클램프 <클램프 ID>: 켜기/끄기, 디렉토리(<방향>)
<클램프 ID>는 특정 클램프 장치를 식별하는 데 사용되는 고유 번호입니다. 클램프 ID를 할당하는 방법을 보려면 클램프 장치 생성에 대한 섹션을 참조하세요.
켜기/끄기 부품을 잡을지 아니면 놓을지를 각각 나타내는 플래그입니다.
<방향>은 클램핑/언클램핑 과정 중 클램프의 이동 방향을 나타내는 정수(+1/-1/0)입니다. 클램핑 프로세스를 고려해 보겠습니다. 부품을 고정하기 위해 조를 안쪽으로 밀면(클램핑 해제된 위치의 축 값이 고정된 위치의 축 값보다 큼) 방향은 "-1"입니다. 부품을 고정하기 위해 조를 바깥쪽으로 밀면(클램프가 부품 내부에 있음) 방향은 "+1"입니다. 언클램핑의 경우 방향이 반전됩니다. "0" 방향은 고정/고정 해제 상태에 대한 동일한 클램프 축 값을 나타냅니다(일반적으로 클램프 장치 매개변수의 오류입니다).
자동 클램프 제어
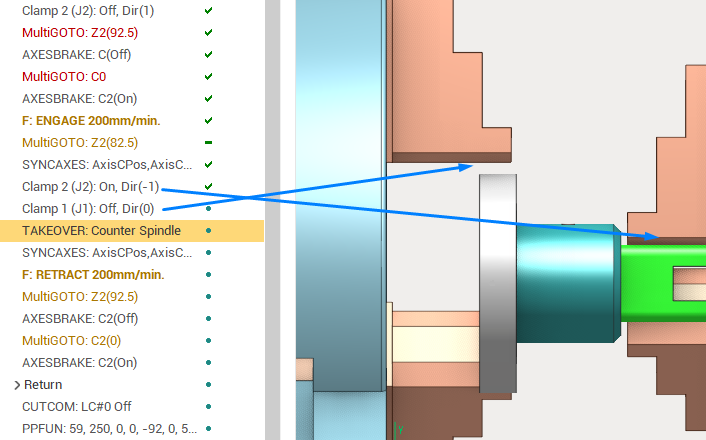
의 작업 이동부분 작업 다음과 같은 그룹 선택 및 장소, <를 출력할 수 있습니다.클램프> 한 공작물 홀더에서 다른 공작물 홀더로 부품을 전송할 때 CLData 명령이 자동으로 실행됩니다. 이 전송은 <에 의해 수행됩니다.인수> CLData 명령. 작업 매개변수에 의해 활성화된 경우 <클램프> 명령은 일반적인 부품 전송 프로세스(위 스크린샷에 표시된 예)를 시뮬레이션하기 위해 자동으로 생성되며, 이는 부품이 일부 장치에 지속적으로 고정되도록 합니다.
타겟 클램프 클램핑 (클램프 2: 켜짐)
초기 클램프 언클램프 (클램프 1: 리터기)
초기부터 타겟클램프까지 인계(Takeover)
클램프 제어 매개변수
는 이동부분 작업 클램프 제어 명령의 출력에 영향을 미치는 다음 매개변수가 있습니다.
는 이동부분 작업 일반적으로 픽 앤 플레이스 프로세스의 3단계에 해당하는 최대 3개의 공작물 홀더로 작동할 수 있습니다.
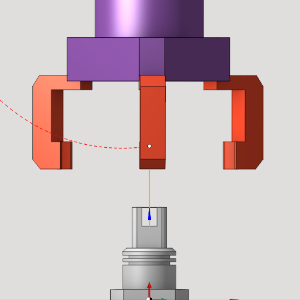
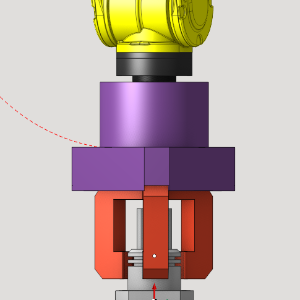
부품은 초기 공작물 홀더에 있습니다.
그리퍼(공작물 홀더이기도 함)를 사용하여 부품을 이동합니다.
부품이 최종 공작물 홀더에 배치됩니다.
클램프 매개변수에는 위 단계에 해당하는 3개의 매개변수 그룹이 있습니다. 다양한 단계의 공작물 홀더가 일치할 수 있으며, 이 그룹의 일부 작업은 부품 이동 프로세스가 더 간단합니다. 이는 클램프 매개변수에도 반영됩니다. 단일 단계의 매개변수를 고려해 보겠습니다.
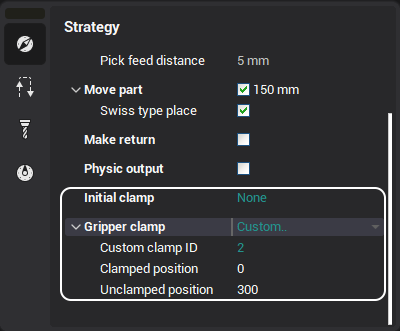
클램프 장치 콤보 상자를 사용하면 해당 이동 부품 단계에 사용되는 클램프를 선택할 수 있습니다. 이 목록에서 클램프 장치를 선택할 수 있게 만드는 방법은 아래 섹션을 참조하세요. 이 매개변수는 <없음>는 명령이 출력되지 않음을 의미합니다. <사용자 정의> 열거 항목을 사용하면 기계 스키마나 픽스처 중에 가 존재하는 경우에도 장치의 클램프 ID를 명시적으로 지정할 수 있습니다.
클램핑 위치 해당 이동부 단계에서 장치의
상태에 해당하는 축 값입니다. 언클램프 위치 해당 이동부 단계에서 장치의
상태에 해당하는 축 값입니다.
클램프 매개변수를 정의하는 방법에 대한 예는 "이동 부분" 작업이 포함된 분배 프로젝트를 참조하세요.
프로젝트에 클램프 장치 추가
프로젝트에는 각 장치가 정수 ID로 식별되는 클램프 장치 목록이 있습니다. 이 목록은 자동으로 생성되며 각 이동 부품 단계에 대한 클램프 장치를 선택하는 데 사용됩니다. 현재 클램프 장치에는 3가지 유형이 있습니다.
고정클램프
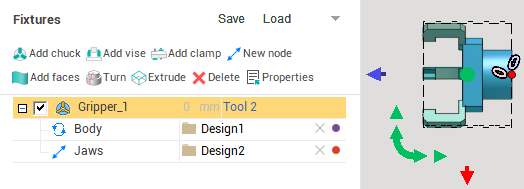
기계/단계/부품 매개변수의 "고정구" 탭에서 "를 사용하여 클램프 장치 고정구를 생성할 수 있습니다.척 추가", "바이스 추가" 또는 "클램프 추가" 버튼을 누르거나 .mcp 파일. 고정 장치 매개변수는 클램프 모델을 수정하는 데 사용할 수 있습니다. 예를 들어 고정 장치 클램프 "축" 노드에 대한 최소값과 최대값을 설정합니다. 참조 고정구 조명기 및 해당 매개변수 생성에 대한 추가 정보에 대한 문서입니다.
특수축, 에서 생성된 기계 메이커. 예를 들어, Machine Maker에서 특별한 "clamp" 플래그를 사용하여 그리퍼나 택 용접 공구를 기계 축(아님 고정 장치)으로 생성할 수 있으며, 이 축은 그리퍼 상태를 변경하는 데 사용됩니다. 또한 이러한 장치의 자동 클램핑/클램핑 해제는 이동부분 작업. 이러한 클램프 장치를 만드는 방법에 대한 자세한 내용은 "CAM 시스템 기계 제조업체" 문서를 참조하세요.
"파라메트릭 턱" 축 . 많은 선반 기계에는 기계 스키마 파일에 특별히 정의된 스핀들 또는 카운터 스핀들 조가 있습니다. 스핀들과 함께 회전하며 시뮬레이션 및 충돌 감지 중에 고려됩니다. 자동으로 인식된 턱 축도 기계 클램프 목록에 추가됩니다. 해당 클램프 ID는 자동으로 할당됩니다. 참조 회전-밀링/Takeover.stcp 이러한 기계 스키마의 예와 MTM의 클램프 사용에 대한 배포 프로젝트가 이어집니다.
운영.