링크 계획
CAM 시스템은 충돌 방지 알고리즘을 사용하여 작업 사이와 작업 내부에서 빠른 공구 경로를 계획합니다. 알고리즘은 기계 노드 간의 충돌 검사를 기반으로 하기 때문에 로봇 셀에 대한 신뢰할 수 있는 설명이 필요합니다.
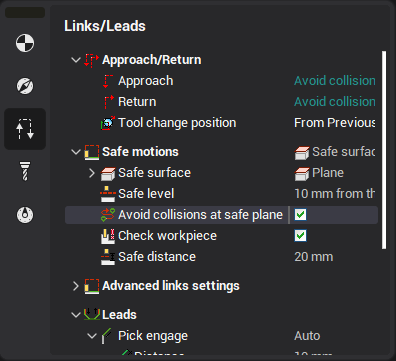
"를 켜세요.안전한 평면에서 충돌 방지" 작업 내부의 알고리즘을 활성화합니다. 매개변수 "링크 안전거리"는 충돌까지 허용되는 최소 거리를 정의합니다. 이 값은 최소이고 충분해야 합니다. 너무 작으면 공구 경로가 충분히 안전한 것입니다. 안전 거리가 너무 길면 링크가 구축될 수 있거나 계산 시간이 허용되지 않습니다.
지원되는 작업
이 옵션은 현재 다음 작업(및 의도적으로 비활성화된 경우 해당 하위 작업)의 로봇에만 사용할 수 있습니다.
링크 시작 및 끝 지점
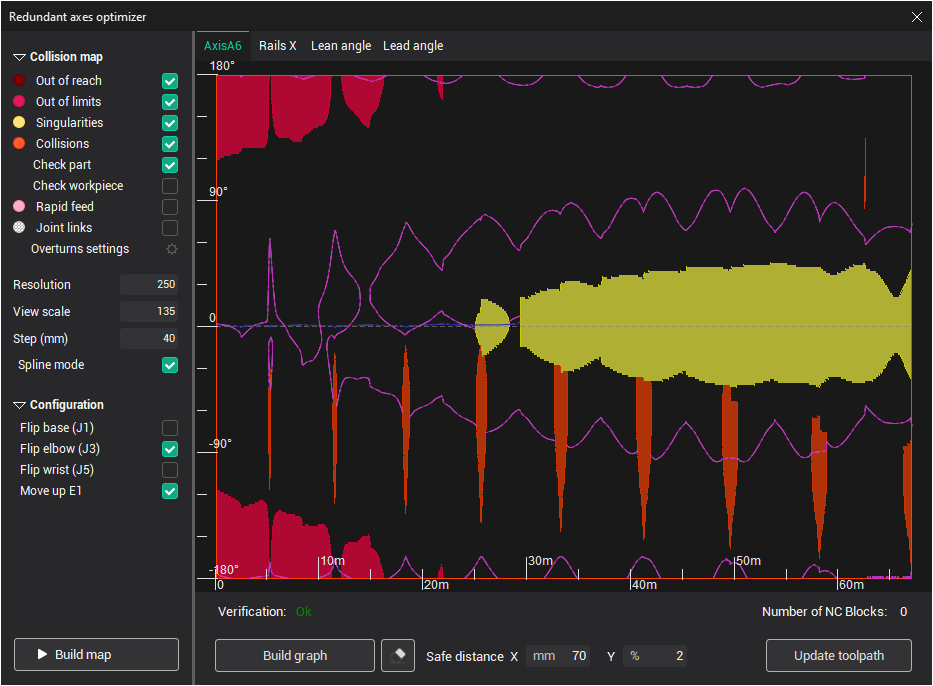
링크의 시작점과 끝점이 충돌하지 않는 위치에 있는지 확인하는 것이 중요합니다. 그렇지 않으면 잘못된 도구 경로가 생성됩니다. 이는 추가 축 최적화 프로그램을 사용하여 수행할 수 있습니다. 지도의 회색 영역은 링크에 해당합니다. 이러한 영역에는 제한 사항이 표시됩니다. 따라서 스플라인은 모든 충돌을 피해야 합니다.
기계물 충돌
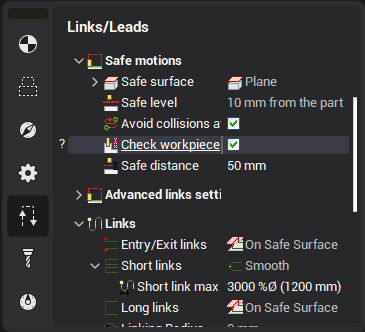
그래서, 알고리즘은 충돌을 확인할 때만 부품을 설명합니다. 공구(또는 기계)와 공작물 사이의 충돌 방지를 활성화하려면 '공작물 감지' 옵션.
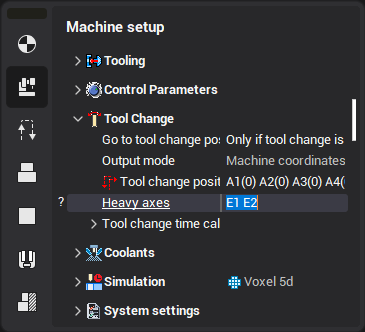
축 이동 제외
는 충돌 회피 알고리즘은 기계의 모든 축을 사용하여 시작점부터 끝점까지의 경로를 검색합니다. 일부 축의 동작을 제외하거나 최소화하려면 해당 축이 기계의 무거운 축 목록에 나열되어야 합니다. 링크가 중축에 의한 동작을 요구하는 경우에는 3단계로 수행됩니다. 첫 번째는 공구 교환 위치로의 동작, 그 다음에는 중축의 동작, 마지막으로 끝점으로의 동작입니다.