설정 패널
응용프로그램 영역:
설정 탭은 프로젝트의 기본 매개변수를 구성하는 데 사용됩니다. 여기에는 장비에서의 부품 위치 지정, 부품의 좌표계 및 기타가 포함될 수 있습니다.
설정 및 툴링.
생성방법.
모델링 방법을 변경합니다. 이러한 각 모드에는 고유한 장점과 단점이 있습니다. '복셀 5D'가 기본 모드입니다. 빠른 모델링이 가능한 반면, '솔리드' 모델링은 시간이 더 걸리지만 더 높은 정밀도를 제공합니다. 예를 들어 큰 부품에 작은 구멍을 작업하는 경우 '솔리드' 모델링을 선택해야 합니다.
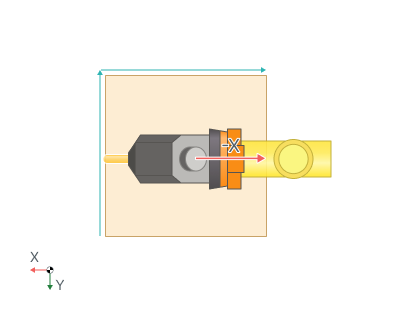
작업 좌표계의 공구 좌표
이 탭에는 기하학적 좌표계가 표시됩니다. 괄호 안에는 특정 축을 따른 움직임에 해당하는 물리적 축의 이름을 표시했습니다.
선형 물리적 축
해당 축(해당 축의 끝 센서)의 물리적 영점과 관련된 기계의 선형 축 값입니다. 여기에 관련된 축의 모든 기본 물리적 좌표를 표시합니다. 작업 좌표계의 공구 좌표.
기타 축
이 그룹은 척 조의 이동과 관련된 축과 같은 보조 축을 지정합니다.
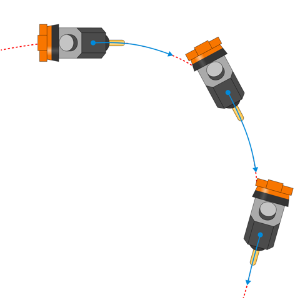
그래프 생성
는 축 맵 로봇의 과도한 자유도(6번째 축, 레일 축, 회전 테이블 축)에 대한 수동 및 미세 조정 자동 제어 법칙을 정의할 수 있습니다. 이 기능은 그래프 생성 매개변수 옆에 있는 줄임표 버튼을 눌러 사용할 수 있습니다. 처리를 최적화하기 위해 장비의 사용 가능한 여러 축 간에 전환하는 것이 가능합니다.
매핑은 로봇에 적용 가능합니다( 더보기 ) 및 5축 기계 .
6축 제어
축 도구(밀, 빔, 제트) 위치에는 5개의 자유도가 필요합니다. 표준 산업용 로봇에는 6개의 축이 있습니다. 도구가 로봇의 마지막 관절의 회전축과 정렬되어 있는 경우 도구를 자체 축을 중심으로 회전시켜 로봇을 특정 지점에 정확하게 위치시킬 수 있는 무한한 가능성이 있습니다. 이는 접근하기 어려운 영역에 접근할 때 추가적인 유연성을 제공하고 다양한 운동학적 특이점을 우회하는 데 도움이 되며 장비 구성 요소 간의 기계적 충돌을 방지합니다. 더보기
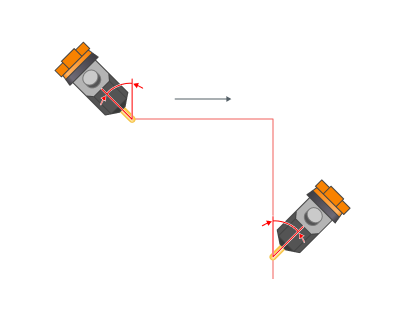
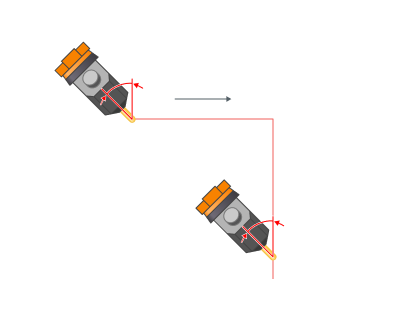
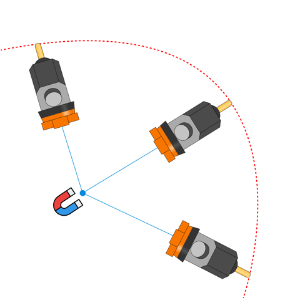
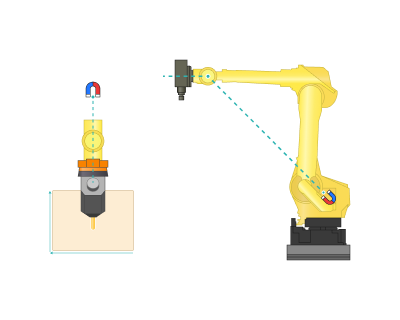
다이렉트 to point.
이 모드에서는 가공 중에 5번째 축과 6번째 축의 교차점을 최소 거리로 끌어당기는 3D 점을 지정합니다.
점.
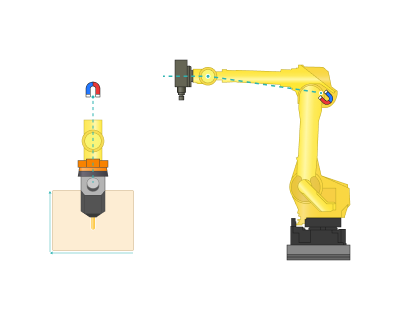
로봇 베이스 포인트. 이 모드에서는 포인트가 로봇의 홈/베이스 포인트에 위치하게 됩니다.
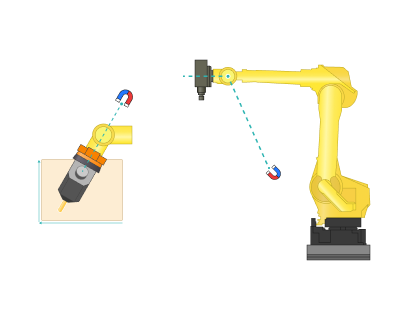
로봇 팔꿈치 포인트. 이 모드에서는 포인트가 로봇의 팔꿈치 지점에 위치하게 됩니다.
사용자 정의. 이 모드에서는 사용자의 지시에 따라 포인트의 위치가 결정됩니다.
고정 벡터.
이 모드에서는 로봇 베이스의 좌표계에서 로봇 플랜지(6번째 축)의 원하는 방향을 정의합니다.
벡터입니다. 로봇의 6번째 축에 대한 벡터입니다.
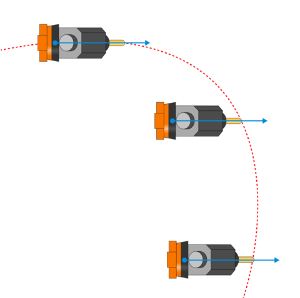
공구 경로
이 모드에서는 TCP의 한 축이 공구 경로 방향과 정렬됩니다.
좌표 편차. 도구를 따라 6번째 축에 대한 추가 각도를 정의합니다.
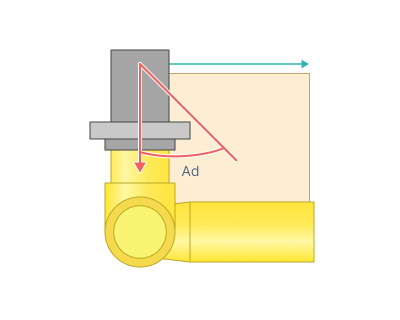
탄젠트 근사치.
레코드 방향 고정. 선택한 전역 좌표계를 기준으로 지도(기울기 각도, 리드 각도)에서 선택한 각도로 도구의 움직임을 고정합니다.