5축 가공
CAM 시스템은 기계 운동학 및 사용된 제어 매개변수를 기반으로 5축 밀링 기계에 대한 도구 경로를 생성할 수 있습니다. CAM 시스템은 사실상 모든 기계 제어 구성을 지원합니다. 생성된 공구 경로에는 기계의 XYZ 축 위치 지정을 위한 명령(GOTO, CIRCLE 등)과 기계 회전 축 위치 지정을 위한 명령(MULTIGOTO)이 포함되어 있습니다. 일반적으로 대부분의 제어에서 회전 좌표는 해당 기계 축의 실제 위치인 반면 XYZ 좌표는 일부 공작물 좌표계를 기준으로 한 툴링 지점의 좌표입니다. 5축 컨트롤 간의 주요 차이점은 로터리 축 위치를 변경한 후 컨트롤이 툴링 지점과 공작물 좌표계를 업데이트하는 방식에 있습니다.
대부분의 컨트롤에는 5축 가공을 위한 두 가지 모드가 있습니다. 기본 "3축" 모드와 "공구점 관리(TCPM)" 모드가 있습니다. 컨트롤은 이러한 모드에서 다르게 작동합니다. 어쨌든 컨트롤의 동작은 세 가지 옵션으로 구성됩니다.
1. 툴링 포인트가 툴 헤드 회전과 함께 회전합니까, 아니면 고정되어 있습니까?
2. 공작물 원점(G54)은 회전 테이블과 함께 회전합니까, 아니면 고정되어 있습니까?
3. 공작물 좌표계의 축이 회전 테이블과 함께 회전합니까, 아니면 고정되어 있습니까?
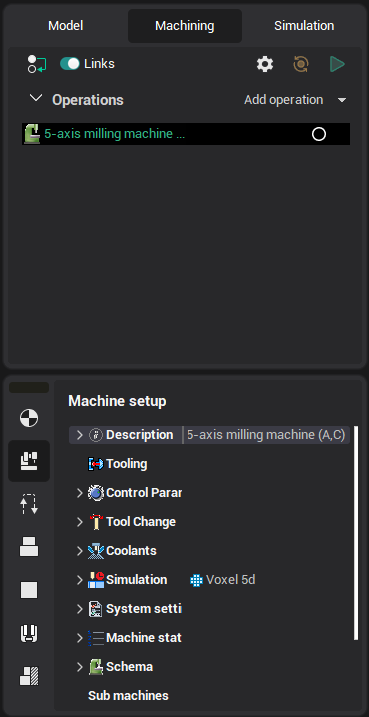
CAM 시스템에서는 두 가지 옵션 모두 ControlData 섹션 아래의 기계 구성 파일과 제어 파라미터 섹션 아래의 기계 속성 검사기에서 사용할 수 있습니다.
옵션은 다음과 같습니다.
1. TCPM 모드를 사용할 수 있는 옵션으로 연속 5축 밀링 작업에서 공구 중심점 관리 옵션을 사용할 수 있습니다.
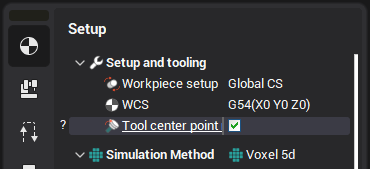
도구 중심점 관리 옵션이 활성화되면 CAM 시스템은 INTERP 5AXIS ON, INTERP 5AXIS OFF 명령을 사용하여 생성된 도구 경로의 작업 패스를 포함하고 TCPM 5축 보정 모드 섹션에 설정된 옵션과 관련하여 작업 패스의 CLDATA를 생성합니다.
2. TCPM 모드 기본 상태 옵션은 5축 밀링 작업에서 TCPM 모드 옵션의 기본 상태를 지정합니다.
3. 인덱스 5축 보상 모드 그룹에는 제어 작업의 기본 "3축" 모드에 대한 5개 축 보상 옵션 세트가 포함되어 있습니다.
4. TCPM 5축 보상 모드 그룹에는 제어의 TCPM 모드에 대한 5개 축 보상 옵션이 포함되어 있습니다.
5. 5축 툴링 포인트 보상 옵션은 로터리 헤드와 함께 툴링 포인트의 회전을 담당합니다.
6. 5축 공작물 영점 보정 옵션은 회전 테이블을 사용하여 공작물 영점 회전을 담당합니다.
7. 5축 좌표계 보정 옵션은 회전 테이블과 함께 공작물 좌표계의 좌표축 회전을 담당합니다.
대부분의 최신 제어에는 TCPM 모드를 사용할 수 있으며 이 모드에서는 세 가지 5축 보정 옵션이 모두 활성화됩니다. 이를 통해 기계 운동학, 공작물 설정 및 공구 길이에 독립적인 5축 공구 경로를 생성할 수 있습니다.
그러나 기본 "3축" 모드에서는 대부분의 컨트롤이 3개의 5축 보상 옵션을 모두 비활성화합니다. 이로 인해 기계 운동학에 대해 전혀 알지 못하는 일반 3축 제어처럼 작동하게 됩니다. 인덱싱된 3+2 도구 경로 생성을 가능하게 하려면 해당 제어에 로컬 좌표계를 의무적으로 사용해야 합니다(Heidenhain 평면 기능, CYCLE 19). 자세한 내용은 다음을 참조하세요. 공구 방향 주제.
고급 축 제한 제어 다축 작업에 사용할 수 있는 기능입니다.
참조: