점 용접 작업
이 작업은 가접(Tack weld) 및 점 용접(Spot weld)에 사용할 수 있습니다.![]() 가접
가접![]() 점 용접.
점 용접.
작업 할당
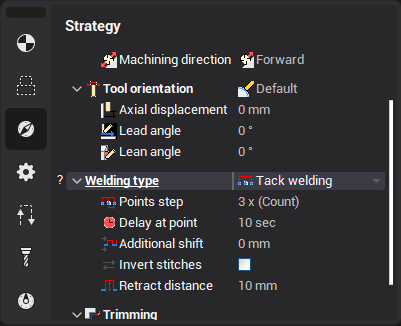
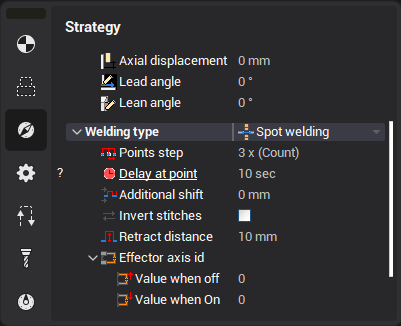
전략 탭에서 용접 유형을 선택해야 합니다:가접점 용접
|
|
|
|
|
|
두 유형 모두 작업 할당 방식은 동일합니다.
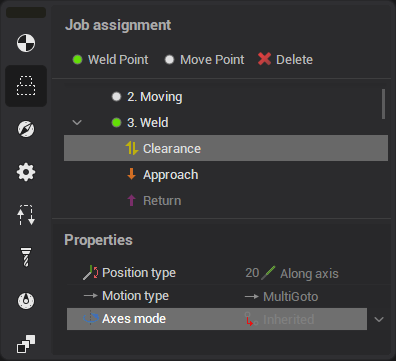
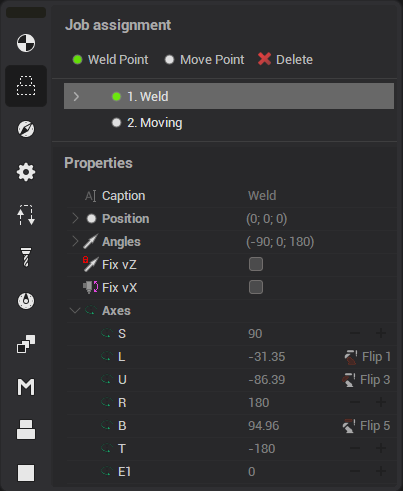
작업 할당은 두 가지 유형의 점으로 구성됩니다:job assignment ![]()
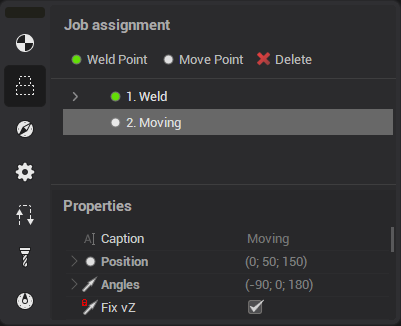
 용접점
용접점 이동점
이동점
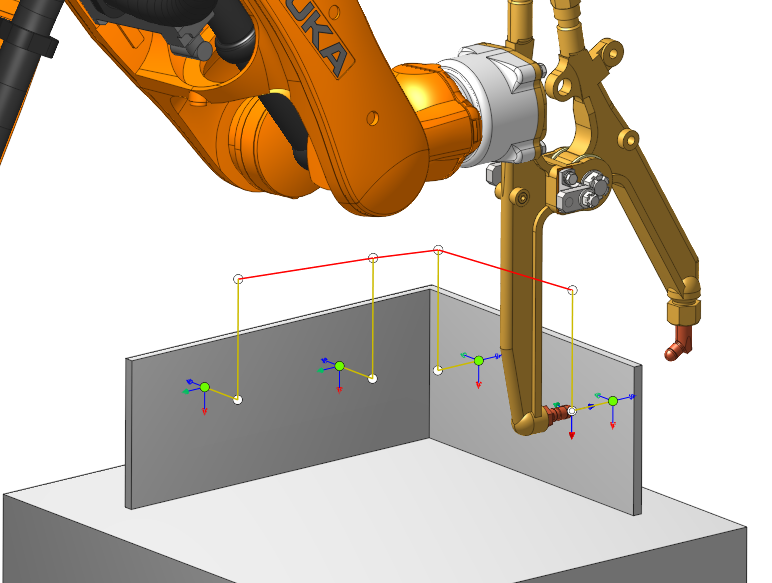
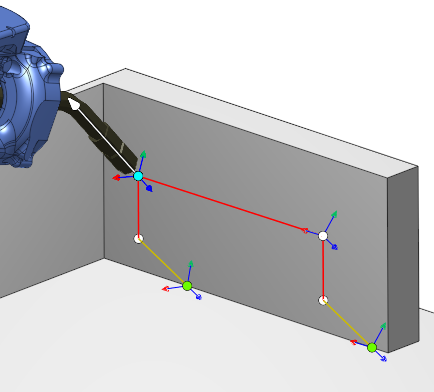
이 점들을 사용하여 경로 체인을 구성할 수 있습니다:
드래그 점
이 점들은 드래그하여 이동할 수 있습니다.
면, 곡선, 스플라인, 모서리, 꼭짓점에 부착됩니다. 부착 시 공구 축이 자동으로 회전합니다.![]()
![]()
![]()
![]()
![]()
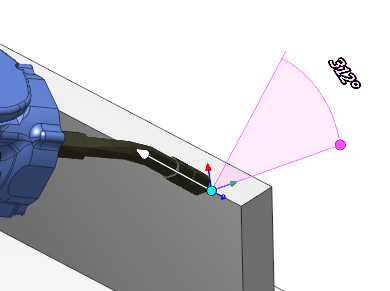
이동 점이동점은 스마트 스냅을 사용하여 쉽게 이동할 수 있습니다:스마트 스냅 
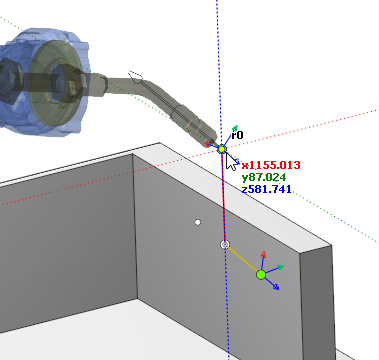
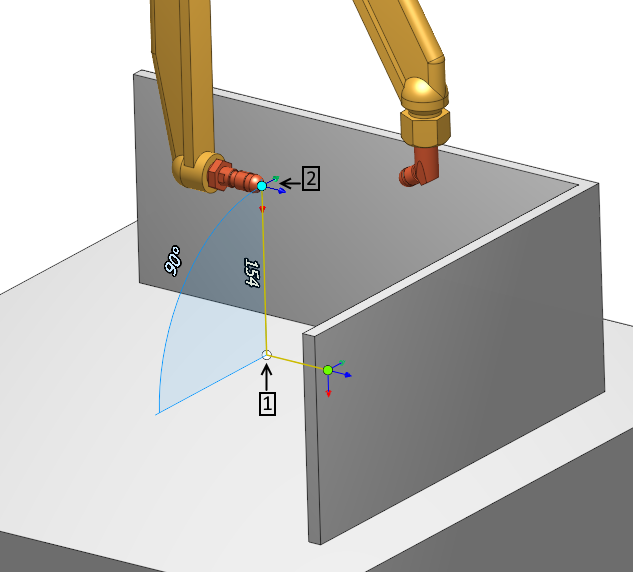
점의 위치는 보조 노란색 점으로부터의 오프셋으로도 지정할 수 있습니다.
이렇게 하려면 먼저 노란색 점을 선택합니다:
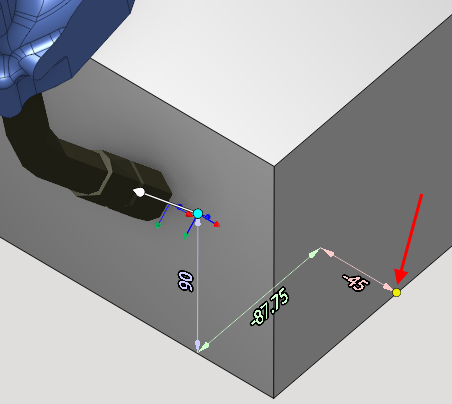
시각적 벡터를 드래그하여 축 벡터를 회전할 수도 있습니다:
점 파라미터
점에는 다음 파라미터가 포함되어 있습니다:
용접점
![]() 이동점
이동점
![]() 내용 - 캡션 - 점 이름
내용 - 캡션 - 점 이름
![]() 위치위치 - 점 좌표.
위치위치 - 점 좌표.
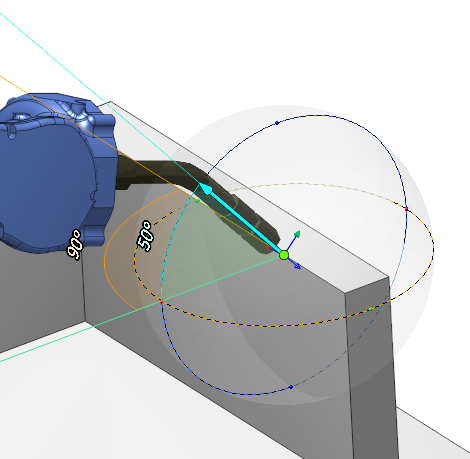
![]() 각도각도 - 해당 점에서의 공구 축 경사각
각도각도 - 해당 점에서의 공구 축 경사각
![]() vZ 고정vZ 고정 - 활성화하면 드래그 시 점의 벡터가 변경되지 않음
vZ 고정vZ 고정 - 활성화하면 드래그 시 점의 벡터가 변경되지 않음
![]() vX 고정vX 고정 - 6축 편집 모드 활성화:
vX 고정vX 고정 - 6축 편집 모드 활성화:
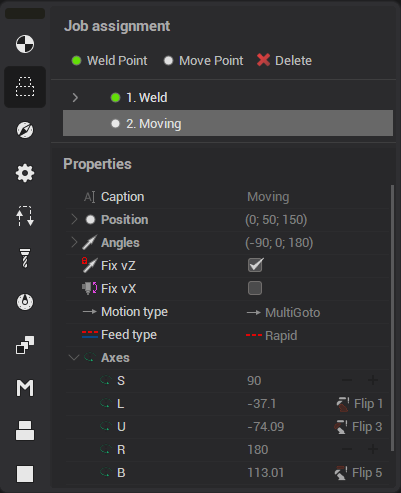
 동작 유형이동 유형 - 점으로 이동할 방식을 설정합니다:MultiGoto - 다축 좌표 이동PhysicGoto - 물리적 기계 축 이동충돌 회피 - 충돌 회피 이동
동작 유형이동 유형 - 점으로 이동할 방식을 설정합니다:MultiGoto - 다축 좌표 이동PhysicGoto - 물리적 기계 축 이동충돌 회피 - 충돌 회피 이동
- MultiGoto - 다축 좌표 이동
 PhysicGoto - 물리적 기계 축 이동
PhysicGoto - 물리적 기계 축 이동 충돌 회피 - 충돌 회피 이동
충돌 회피 - 충돌 회피 이동
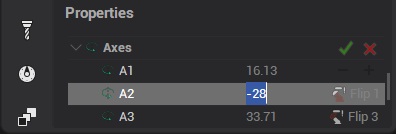
![]() Axes - 축 - 현재 점에서의 기계 축.
Axes - 축 - 현재 점에서의 기계 축.
축을 변경하면 두 개의 버튼이 나타납니다:
 - 점을 공작 기계의 선단으로 이동
- 점을 공작 기계의 선단으로 이동
![]() - 이전 값으로 복귀
- 이전 값으로 복귀

![]() - 360/+360
- 360/+360
![]() 플립 - 로봇의 플립을 제어
플립 - 로봇의 플립을 제어
보조 점
![]() 용접 점용접점에는 추가 보조점도 포함되어 있습니다:클리어런스진입퇴피
용접 점용접점에는 추가 보조점도 포함되어 있습니다:클리어런스진입퇴피
클리어런스
진입
퇴피