원통 보간
원통 보간은 2D 윤곽 가공, 포켓 가공, 2.5D 포켓 가공, 2.5D 벽면 가공 작업에서 사용할 수 있습니다.
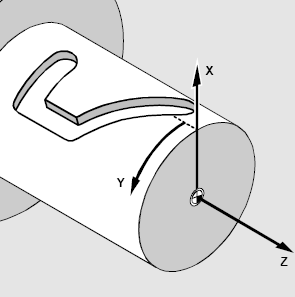
원통 보간은 전개 곡선을 프로그래밍하여 원통의 측면을 밀링 가공할 수 있는 기능을 제공합니다. 전개 곡선은 [X,Y,Z] 좌표로 프로그래밍되지만, 실제 원통 밀링 가공은 [X,C,Z] 좌표로 수행됩니다. 따라서 원통 보간은 [X,Y,Z] => [X,C,Z] 변환을 수행합니다.
원통 측면의 밀링 가공 가능 여부는 공작 기계의 구조에 따라 달라집니다.
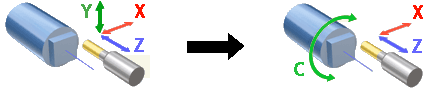
공작물을 회전시키는 <회전축>(회전 테이블, 선반 스핀들)이 있어야 합니다.
회전축은 공구 회전축에 수직으로 배치되어야 합니다.
공구 회전축은 공작물 회전축과 교차해야 합니다.
회전축에 수직인 평면에서 공구를 이동시키는 <반경 축>이 있어야 합니다.
회전축 방향으로 공구를 이동시키는 <축 방향 축>이 있어야 합니다.
위의 모든 조건이 충족되고 기계 → 제어 파라미터 → 회전 변환 → 원기둥형 보간 사용 가능 변수가 설정되어 있으면, 변환 페이지에서 회전 변환 패널을 사용할 수 있습니다.
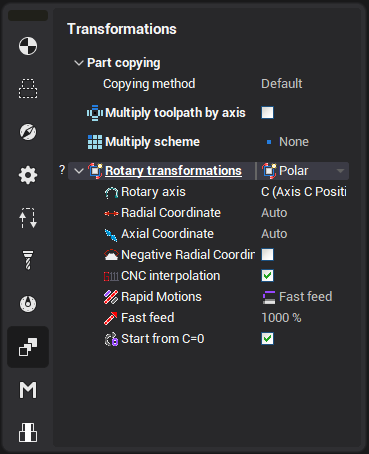
<모드> 필드는 회전 변환 모드(없음, 극좌표 변환, 원통 변환)를 정의합니다. 공차는 변환된 공구 경로와 이상적인 경로 사이의 편차를 정의하며, 밀리미터(인치) 단위로 측정됩니다.
원통 변환은 다음과 같은 계산을 수행합니다.
![]() ,
,
여기서:
А – 회전축의 위치(도 단위),
Y – 회전축에 대응하는 가상 전개 축의 위치,
R – 원통의 반경.
해당 필드들은 회전축, 반경 축 등으로 사용할 기계 축을 정의합니다. 이 파라미터들의 기본값은 기계 스키마에서 정의됩니다.
최신 수치 제어 장치는 원통 변환 기능을 내장하고 있습니다. 따라서 위에서 설명한 변환이 CAM 소프트웨어가 아닌 제어 장치 내부에서 수행됩니다. 이러한 공작 기계의 경우 <CNC 보간> 체크 표시를 활성화하는 것이 좋습니다. 이 경우 G코드는 [X,Y,Z] 좌표로 생성되며, 제어 장치가 [X,Y,Z] => [X,C,Z] 변환을 수행합니다. 대부분의 경우 G코드는 다음과 같은 순서로 구성됩니다:
실제 기계 축 좌표로 프로그래밍된 시작점으로의 위치 결정.
원통 반경을 지정하여 원통 보간 모드를 활성화합니다.
[X,Y,Z] 좌표로 프로그래밍된 프로파일을 따른 이동.
원통 보간 모드를 해제합니다.
주요 제어 장치에 대한 해당 명령은 아래 표에 나와 있습니다.
|
수치 제어 장치 |
원통 보간 활성화 명령 |
원통 보간 해제 명령 |
|
FANUC, Mоri Seiki, HAAS 등 |
G07.1 (G107) |
G07.1 (G107) |
|
Sinumeric |
TRACYL |
TRAOFF |
|
Heidenhain |
사이클 27 |
- |
기계 → 제어 파라미터 → 회전 변환 → CNC 원통 보간 지원 변수가 설정되어 있으면 CNC 보간 체크 표시를 사용할 수 있습니다. 이 파라미터가 활성화되면 원통 보간 활성화/해제 명령이 포함된 G코드가 생성됩니다. 비활성화되면 [X,C,Z] 좌표로 G코드가 생성됩니다.
<보간 블록 내 급속 이송 동작 허용>이 체크되어 있으면 공구 경로의 시작 부분에서 보간이 활성화되고 끝 부분에서 해제됩니다. 체크되어 있지 않으면 절삭 이송 전에 CNC 보간이 시작되고 급속 이송 전에 해제됩니다.