코너 제어
적용 범위:
이 파라미터 그룹은 공구경로 코너에 특정 동작을 추가할 수 있도록 합니다. "이송속도/회전속도" 페이지 하단에 위치합니다.
참고
코너 제어는 "파라미터" 페이지의 "유효 이송속도" 파라미터를 통해 설정할 수 있는 유효 이송속도가 적용된 공구경로 구간에만 적용됩니다.
절삭 작업의 경우, "유효 이송속도"의 기본 설정에는 다음이 포함됩니다:
가공 이송속도
진입/퇴피 이송속도
초기 이송속도
정삭 이송속도
"코너 제어" 옵션을 지원하는 작업의 전체 목록은 아래에서 확인할 수 있습니다:
코너를 제어할 수 있는 두 가지 주요 파라미터 그룹이 있습니다: "감지 방법"과 "동작 유형"입니다.
감지 방법:
"감지 방법" 파라미터 그룹은 시스템이 코너를 감지하는 방식을 정의합니다. 현재 "각도 기준" 하나의 파라미터만 사용할 수 있습니다.
각도 기준.
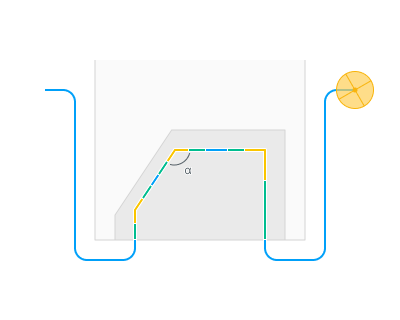
각도 기준.각도 값을 도 단위로 정의합니다. 공구경로의 두 연속 구간 사이의 각도 값이 정의된 값 이하인 경우 해당 구간이 "코너"로 감지됩니다.
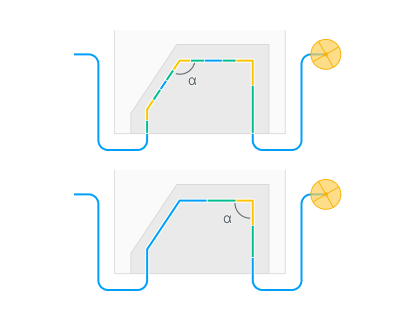
예를 들어, "각도" 값이 110도로 설정된 경우, 102도의 각도를 가진 첫 번째 구간은 시스템에서 코너로 표시됩니다.
또한 보다 정밀한 조정을 위해 "최소 직선 길이"와 "최소 호 반경" 두 가지 추가 파라미터가 있습니다.
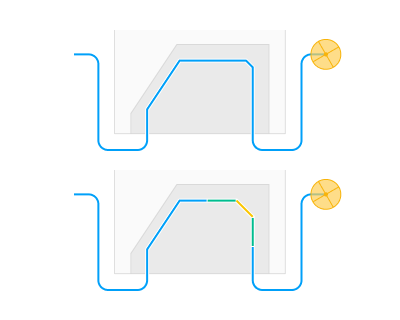
최소 직선 길이최소 직선 길이 파라미터는 코너 감지 알고리즘을 실행하기 전에 원하는 공차(또는 최소 직선 길이) 값을 사용하여 공구경로를 스무딩할 수 있습니다. 따라서 감지 방법은 스무딩된 공구경로에 적용되며, 이를 통해 잘못된 코너 감지나 누락된 코너가 없도록 합니다. 참고: 이 파라미터는 최종 공구경로에 영향을 주지 않습니다. 내부 감지 알고리즘에만 사용됩니다.
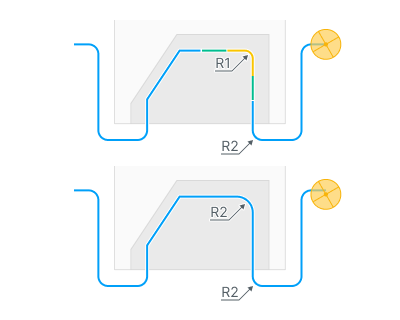
최소 호 반경최소 호 반경 파라미터는 시스템이 코너로 인식할 최소 호 반경(또는 최대 곡률)을 설정할 수 있습니다. 이는 공구경로의 일부 호가 매우 작을 수 있으며, 실제로 이러한 호는 코너와 동일하기 때문입니다.
동작 유형:
"동작 유형" 파라미터 그룹은 공구경로 코너에서의 시스템 동작을 제어합니다. "이송속도 조정", "출력 조정", "이송속도 및 출력 조정" 세 가지 모드를 사용할 수 있습니다.
참고
마지막 두 모드("출력 조정" 및 "이송속도 및 출력 조정")는 "클래딩 5D" 및 "비평면 슬라이싱" 작업에서만 사용할 수 있으며, 파라미터 페이지에서 출력 기능이 활성화된 경우에만 사용할 수 있습니다.
이 그룹은 "목표 값", "단계 수", "단계 길이" 3가지 옵션으로 구성됩니다.
이송속도 조정, 출력 조정, 이송속도 및 출력 조정
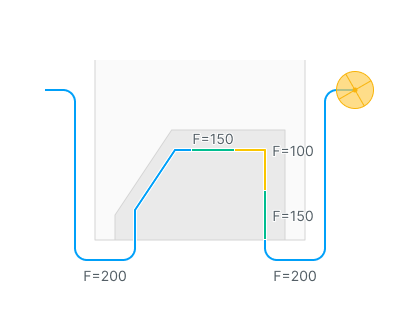
이 모드들은 감지된 공구경로 코너에서 단계적 방식을 사용하여 이송속도 및/또는 출력을 개별적으로 또는 동시에 조정할 수 있습니다.
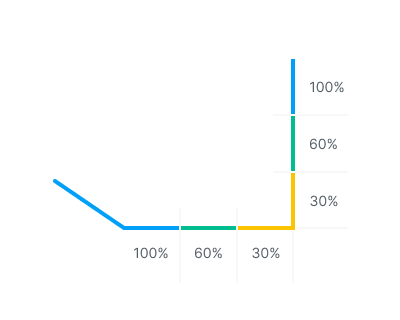
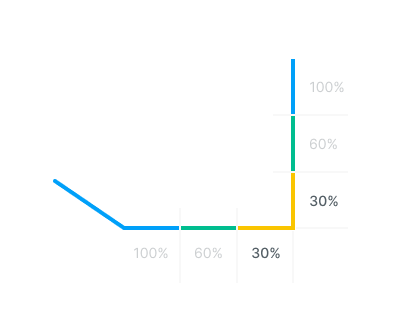
목표 값 감지된 코너에서 기본 파라미터의 백분율로 목표 값을 정의합니다. 100% 미만의 값은 파라미터를 감소시키고, 100% 초과의 값은 파라미터를 증가시킵니다.
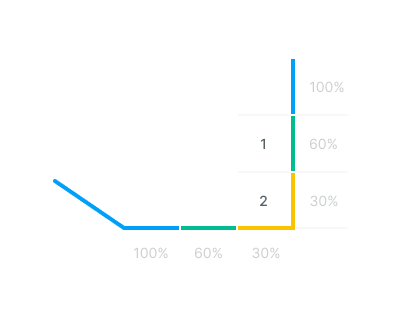
스텝 수 단계 수는 목표 값에 도달하는 데 필요한 단계 수를 정의합니다.
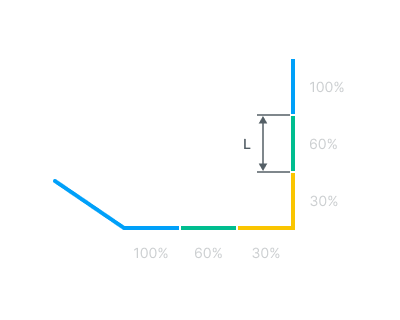
단계 길이단계 길이는 한 단계의 길이를 정의합니다.
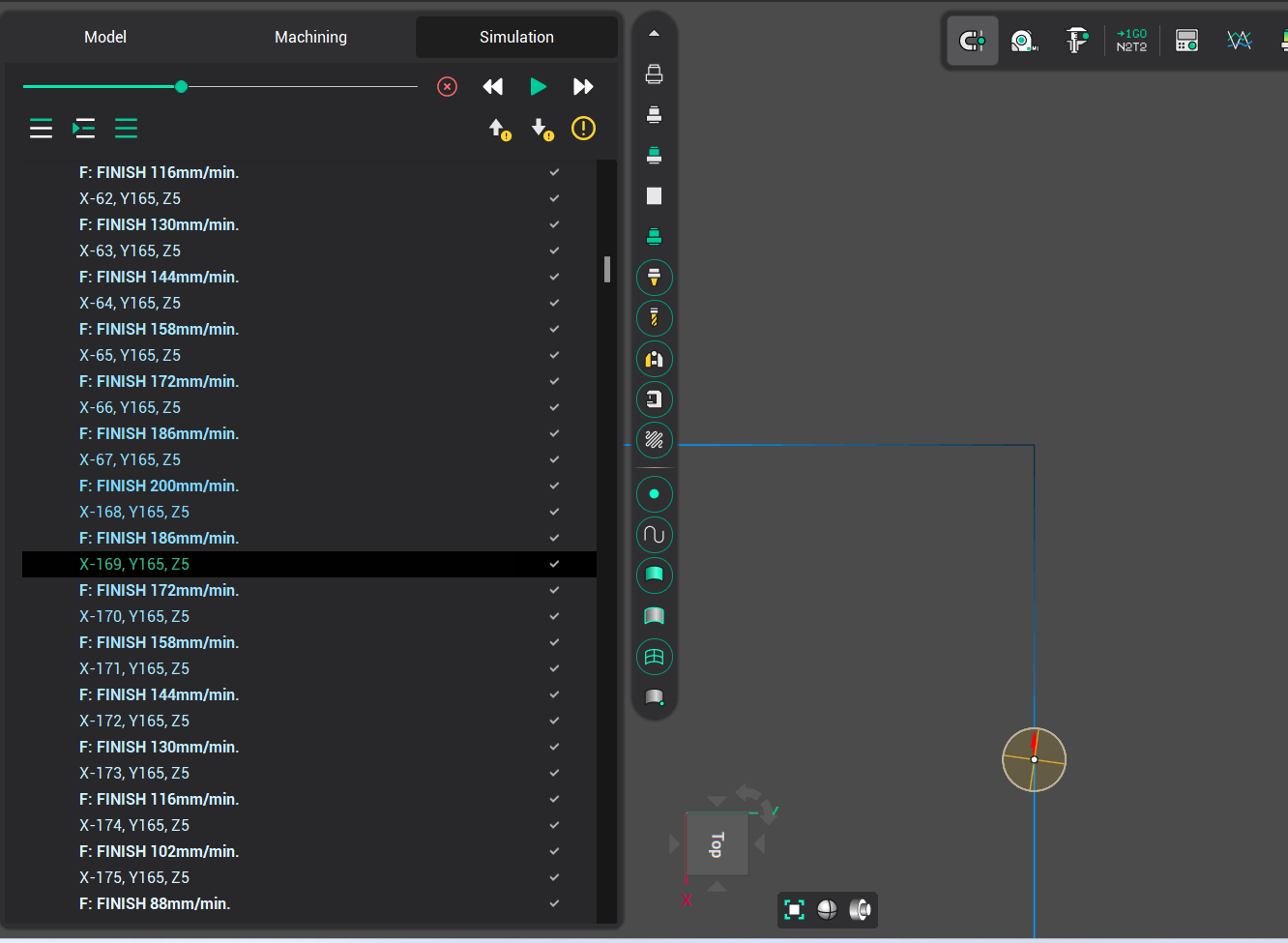
이러한 파라미터의 효과는 시뮬레이션 페이지에서 확인할 수 있습니다. 코너 내의 공구경로 구간은 색상 그라데이션으로 표시됩니다. 또한 감소된 이송속도를 가진 새로운 명령이 CLDATA에 추가되며 마찬가지로 그라데이션으로 강조 표시됩니다.