윤곽 가공 작업 링크
응용 프로그램 지역:
이 그룹은 영역 간 전환 또는 자르기에 대한 설정을 정의합니다.
전환.
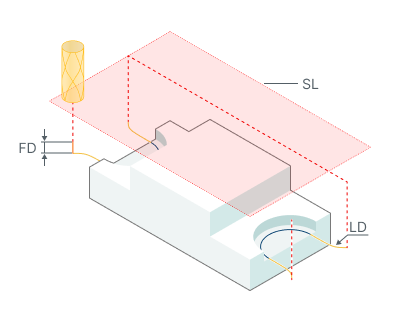
Via safe 평면. 전환은 안전한 수준을 통해 수행됩니다.
FD - 이송 거리
SL - 안전 이동 높이
LD - 리드
공작물 주위. 전환은 작업 경로 수준에서 수행됩니다. 작동하려면 활성화해야합니다 공작물 감지 에서 파라미터 꼬리표. 알고리즘은 공작물에 충돌하지 않고 가장 짧은 공구 경로를 구축합니다.
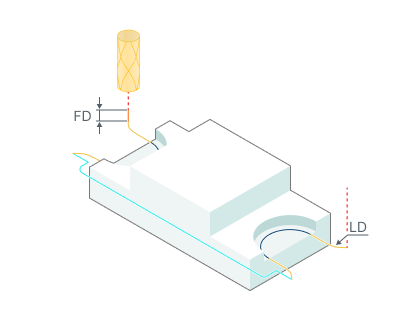
FD - 이송 거리
LD - 리드
레벨별. 전환은 다음에서 측정되는 레벨을 통해 수행됩니다. 공작물 coordinate system.
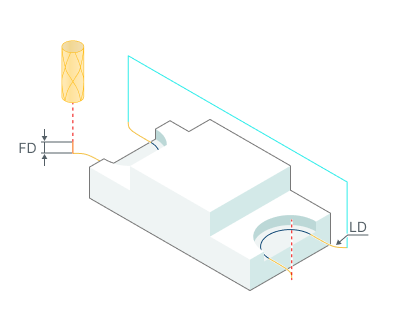
FD - 이송 거리
LD - 리드
높이. 높이 that is measured from the 공작물 coordinate system
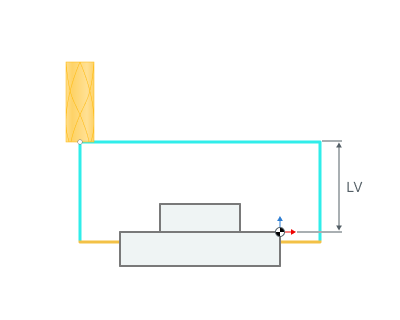
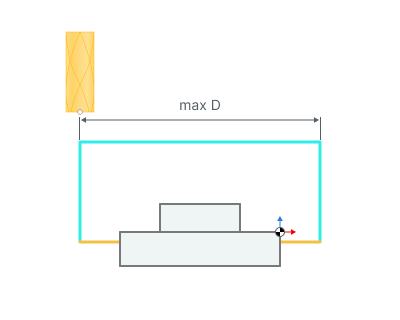
최대 거리. 레벨을 통한 전환이 수행되는 거리를 정의합니다. 거리가 매개변수의 값보다 크면 안전 수준을 통해 전환이 수행됩니다.
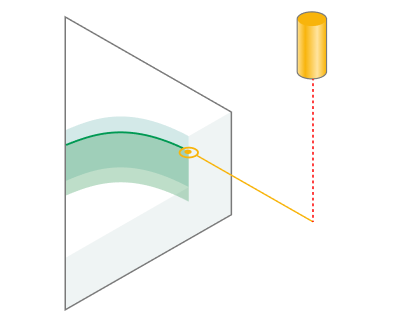
플런지 on 리드인/ Rise on 리드아웃.
급락/상승 방법을 설정할 수 있습니다.
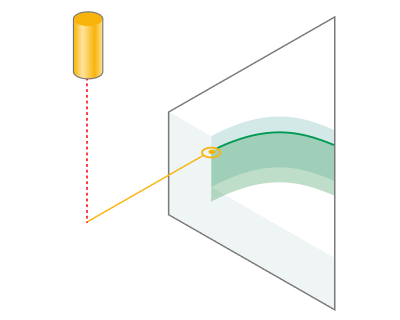
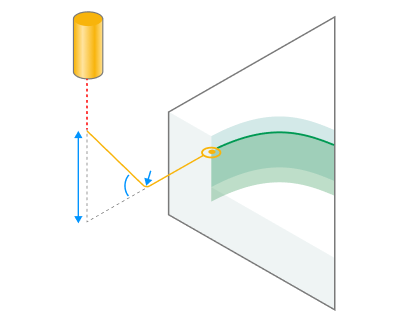
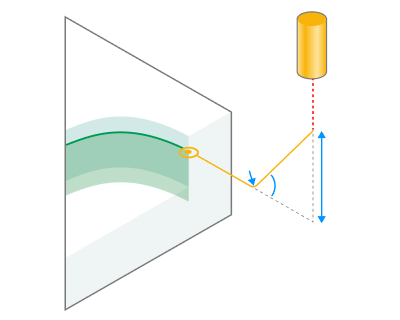
높이. 높이를 결정합니다. 폭락/상승 각도로.
램프 각도. 각도를 결정합니다. 급락/상승.
곡률 완화 arc radius. 다음과 같은 경우 반경을 통해 궤적을 부드럽게 할 수 있습니다. 급락/상승.