급속 이송
로봇에서 G코드 기반 작업을 계산할 때 급속 이송 속도를 설정해야 하며, 이는 "피드/속도" -> "급속 피드"에서 지정합니다(기본값은 10,000 mm/최소으로 설정되어 있습니다).
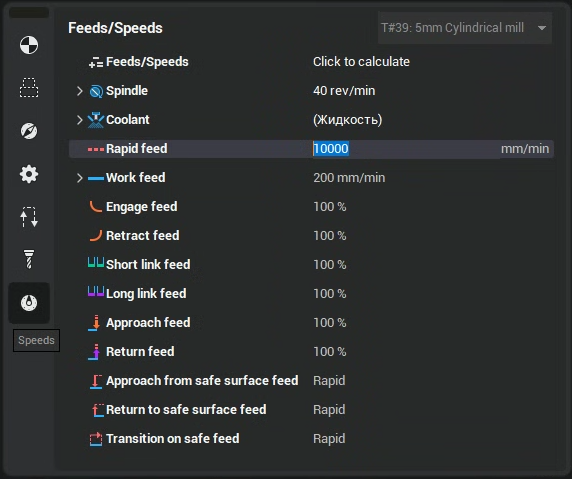
참고: 일반적으로 로봇 제어 프로그램에는 선반이나 밀링 공작 기계에서 G00 명령으로 구현되는 것과 같은 별도의 급속 이송 명령이 없습니다. 모든 이동 명령은 이송 속도 값과 함께 지정됩니다. 로봇의 이동 경로를 올바르게 계산하고 렌더링하려면 급속 이송 값을 설정하십시오.